haaaaaaaaaaaaaaaaaaa, p’tit ride de 3h du mat qu’à fait plaisir :mrgreen: bon mini à peine 500m/1km d’A/R dans la rue.
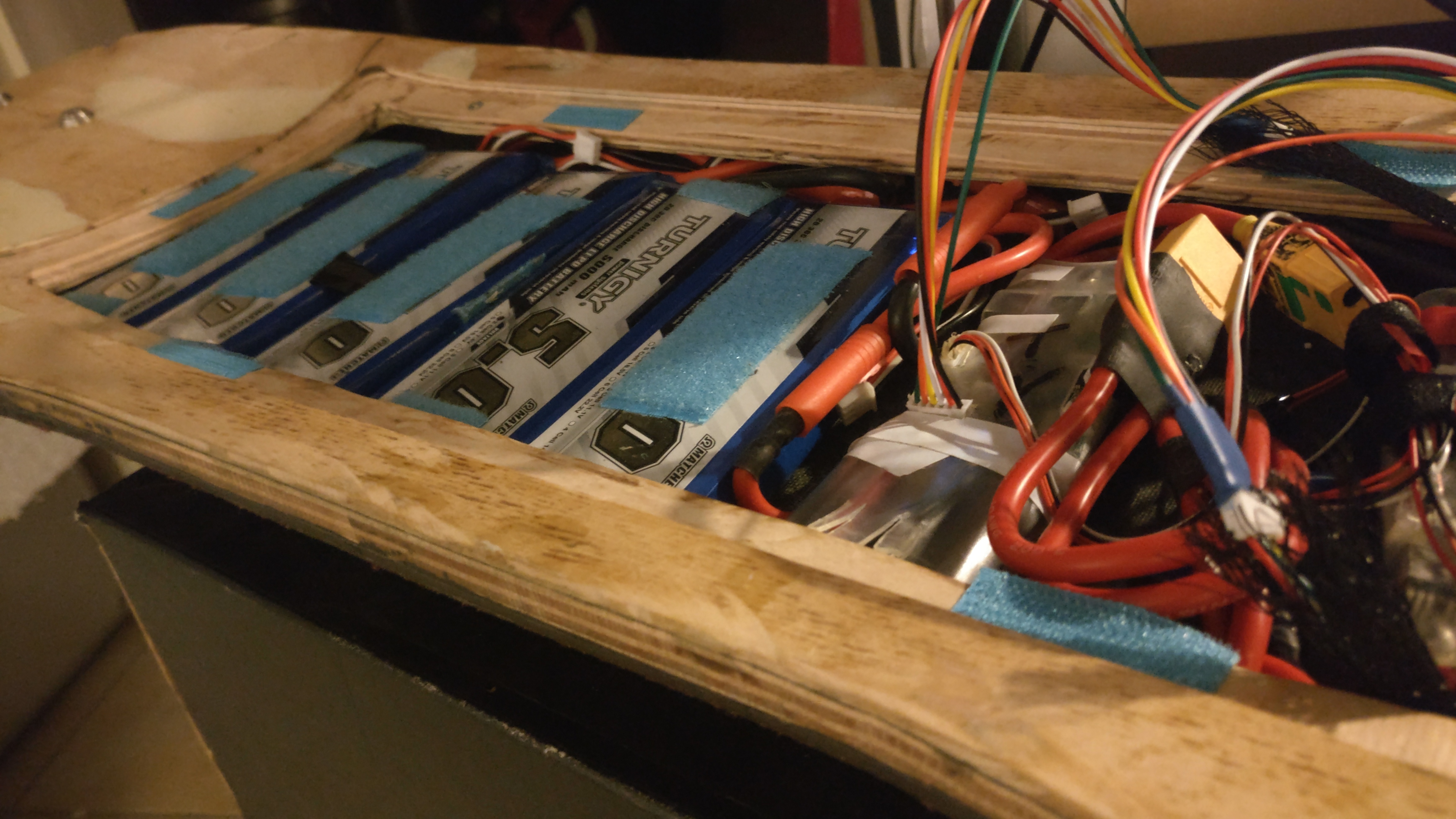
:roll: c’est moi ou y’a rien sous le capot ?! :lol: Pourtant j’ai blindé d’élec tout ça !
Alors déjà merci à Yann et son TUTO : Repérage des phases d’un moteur brushless sensored sans quoi j’aurais pu chercher bien longtemps … Bon les moteurs tjr reconnu en sensorless, j’ai enfin eu une bonne détection après tout avoir démonté/remonté, le problème c’est que du coup je ne sais pas trop d’où veint la fuite mais maintenant les sensor sont reconnu (houra ?!)  bizarre, mais après 6 tests donc (un peu plus pour revérifier à l’oreille avec à chaque fois read, detect et recopie des données sensors) j’obtient une bonne position mais un des moteur est en sens inverse, et sachant que c’est la meilleur position des phase moteur, j’ai pas trouvé le mode reverse pour le moteur ?
bizarre, mais après 6 tests donc (un peu plus pour revérifier à l’oreille avec à chaque fois read, detect et recopie des données sensors) j’obtient une bonne position mais un des moteur est en sens inverse, et sachant que c’est la meilleur position des phase moteur, j’ai pas trouvé le mode reverse pour le moteur ?  j’ai du loupé la case mais j’ai bien regardé pourtant !
j’ai du loupé la case mais j’ai bien regardé pourtant !
Donc pour le moment je ride dans la meilleur position pour le bon sens. ça va ça ne fait aucun bruit bizarre je vous rassure, juste j’ai l’impression que dans ça position optimale (mais en reverse) c’est plus lisse fluide encore à haut régime …
Le ride des hubs, c’est bluffant  mais donné moi au moins la moitié de la puissance d’un setup courroie … :?
mais donné moi au moins la moitié de la puissance d’un setup courroie … :?
là c’est vraiment un truc d’ado j’ai l’impression, j’ai pas tenté plus du coup me disant que vraiment la position n’est pas optimal … j’espère que ça veint de là, je peux même pas démarrer en côte, il ne broute pas mais ne peux pas m’emmener … (on déjà restez avec le 60kv qu’il propose de base je pense  )
)
J’ai monté l’amps max des mini moteurs (à 22A donc … bien bah tout ça) … et pareil pour le freinage (-10A…) car c’est vraiment léger léger ! Et mis le start up boost à 0.03 :ugeek: we will see … test demain matin.
Vous les gars @KRIS- et Benjy vous pouvez partager vos réglages ? même en MP ?
Vous avez un peu de patate ? ça met vraiment longtemps à partir de mon côté (sans mauvais jeux de mots aucuns)…
Dedans c’est un peu serré … mais mon câblage pourrait être plus compact :
Dehors, il manque plein de choses :
-le grip et la découpe de la trappe (je réfléchis comment procédé :roll: )
-le maintient propre des câbles moteurs (qui sont en fil de fer … vraiment pas top ça !)
-couler les câbles qui passent dans le deck (d’où la cale/pad-riser pour le moment pour pas les écraser !)
Mais déjà c’est assez plaisant (pour un 1er ride esk8 de l’année :oops: ), le hub change vraiment l’approche de la board, ça redevient enfin vraiment un longboard côté facilité/liberté de push !!
Mais donnez moi plus de puissance pleeaaase :mrgreen: hâte d’avoir vos retours !





 :roll: je vais creuser mais ça me tente de déjà tester/rider en sensorless du coup … :mrgreen:
:roll: je vais creuser mais ça me tente de déjà tester/rider en sensorless du coup … :mrgreen: