Tu peux utiliser ton châssis de One wheel comme support et le brider dur une table ou entre deux, non?
Tu as pouvoir déterminer le ERPM et donc RPM mais pour la puissance réelle en watt tu fais comment ? Il faut une charge , non ?
Tu connais le nombre de pôles?
VESC tool donne un courant max par moteur mais je ne sais pas si ça suffit pour calculer la puissance en multipliant par la tension…@cathode tu en dis quoi ?
Ah oui je ne l’ai pas dit mais vesc tool te donne effectivement des **e-**rpm et pas des rpm. Les e-rpm c’est le nombre de “crans” que l’esc doit commuter pour que le moteur fasse un tour complet (les à-coups que tu sens à la main la). Chaque “cran” c’est ce qu’on appelle un pole donc pour retomber sur la valeur de rpm il faut diviser les e-rpm par le nombre de paires de pole (oui paire de pole, car l’esc commute toujours au deux endroits opposés à la fois) enfin bref tout ça pour dire que
rpm = e-rpm/ nombre de PAIRES de pôles
Pour connaitre le nombre de pole de ton moteur c’est extrêmement simple, c’est tout simplement le nombre d’aimants.
Du coup quand tu mesureras la taille de tes aimants, profites-en pour les compter (si l’envie te prend d’aller plus loin tu peu vernir stat/rot-or avec le produit qui va bien –> poser un joint pâte sur une flasque –> verser une petite centaine de mL d’huile ATF dans le moteur –> jointé et refermer la seconde flasque. Ce sera à la fois une bonne chose pour éviter la chauffe, mieux éviter l’eau/rouille, augmenter la longévité et ne lave jamais ta machine si le moteur est chaud !)
Quant à la question, ce n’est pas sur un test de KV donc à vide qu’on va déduire une quelconque puissance. Il faut que ça force donc partir de ce que calcul vesctool, monter dessus, faire des démarrages en boucle pour logé ce que fait le vesc et adapter la configuration (bien s’équiper aussi XD)
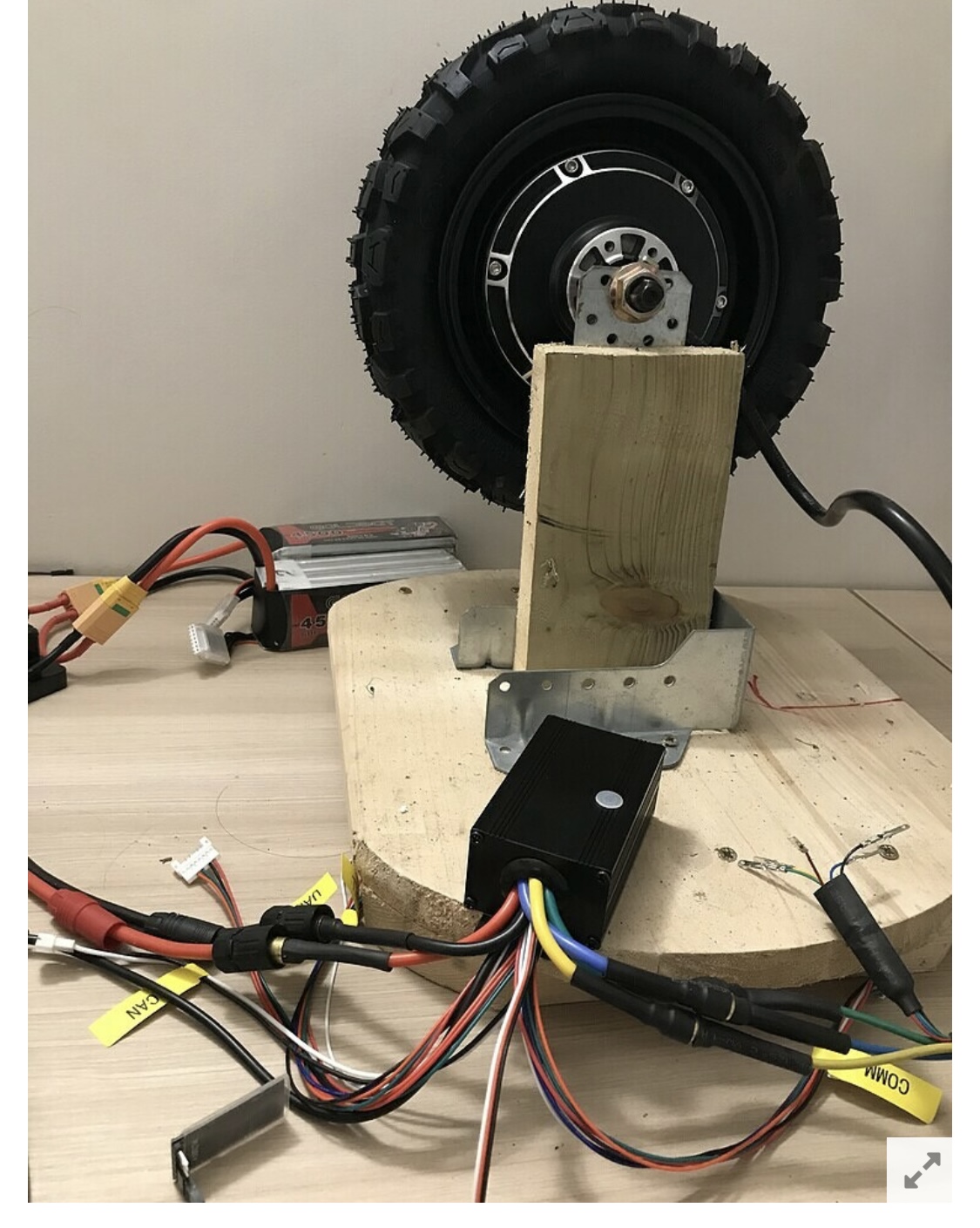
j’ai pas eu le temps de me concevoir un support, je ne peux pas monter le nouveau moteur sur la board il faut fabriquer une pièce en alu. mais cela ne serais tarder.
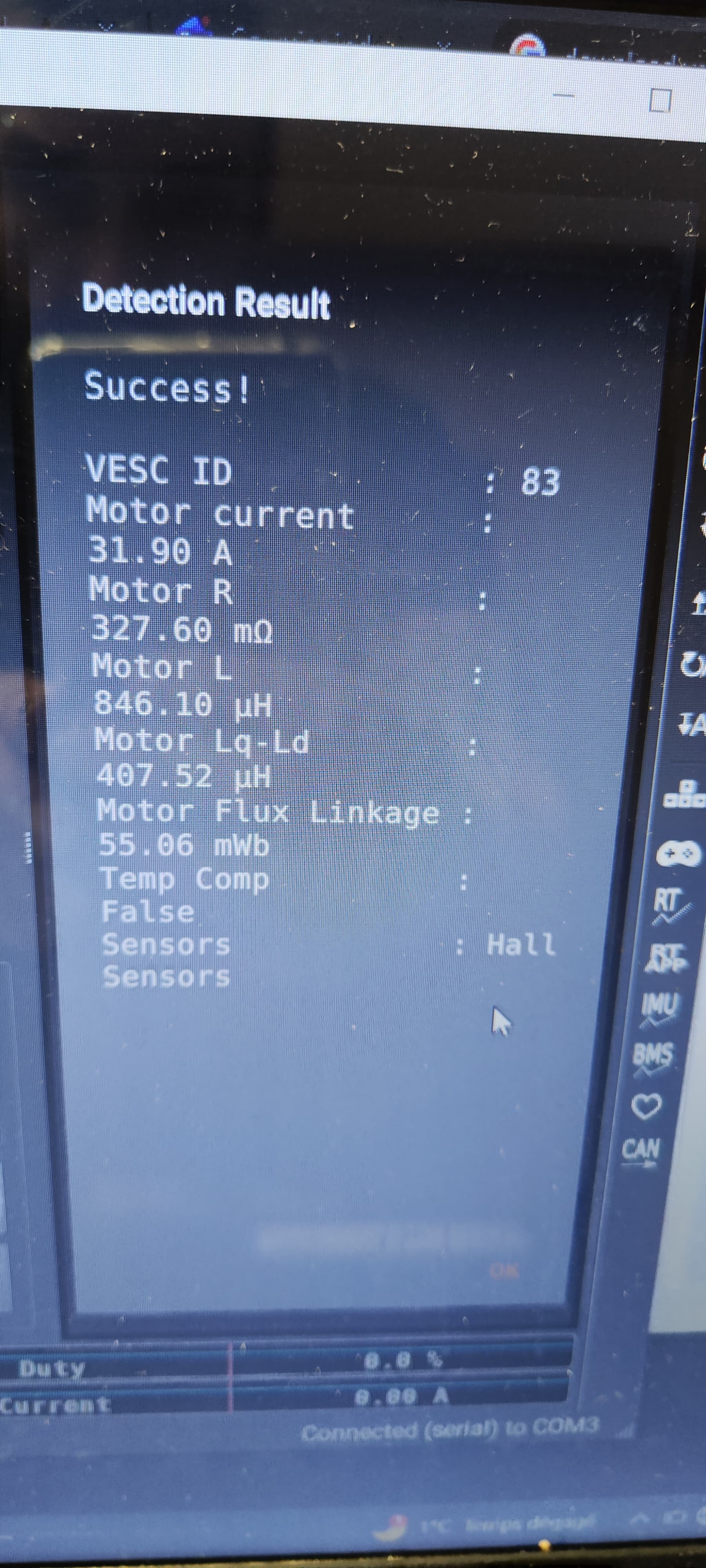
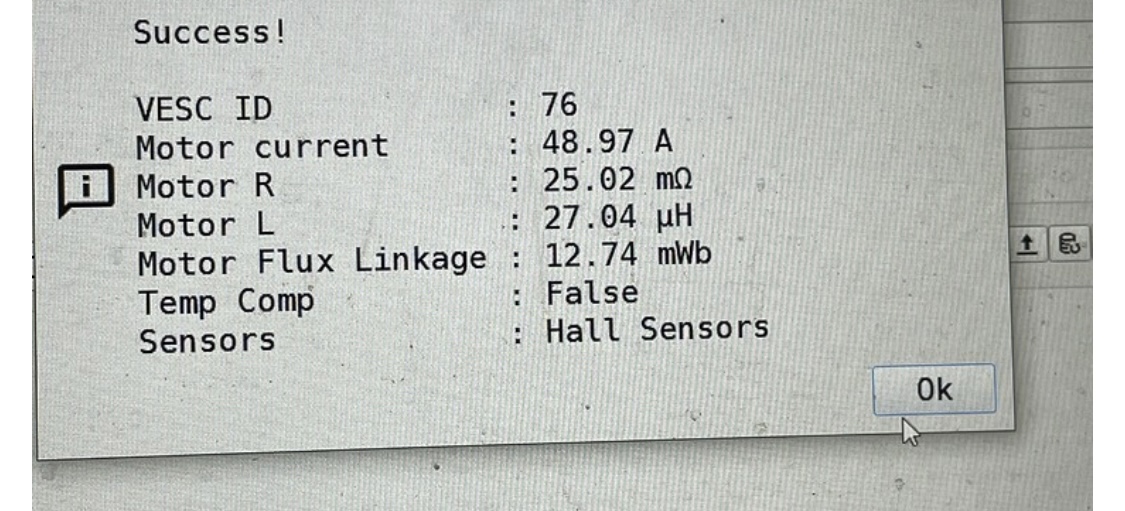
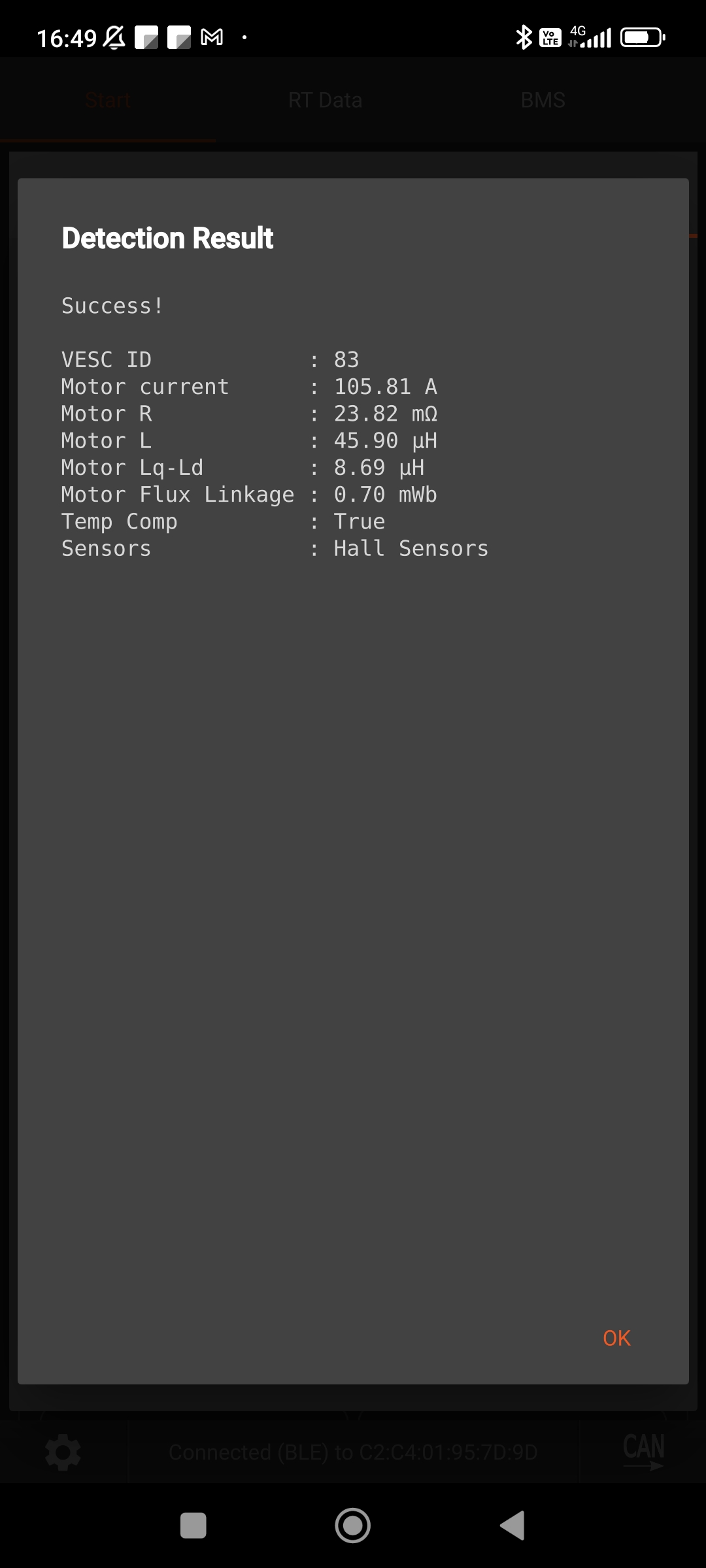
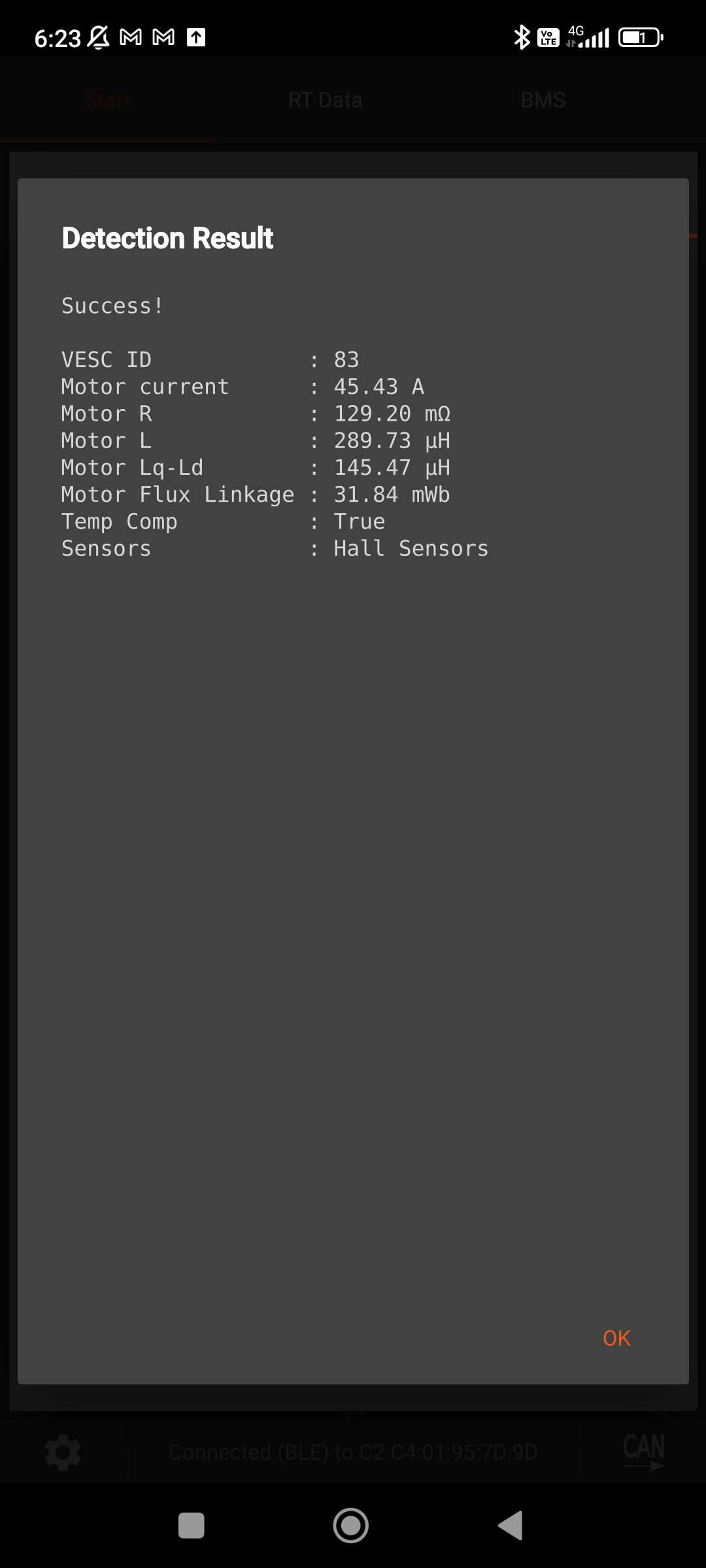
concernant le moteur d’origine (voir les premières photos) j’ai ça avec vesctool:
Tu as bien fait de t’intéresser à quelque chose de normalement plus sérieux.
Edit, je sais pas si t’as un module bluetooth (intégrer ou pas) a ton vesc mais si jamais sur téléphone le “vesc tool” gratuit c’est “freesk8” . Que ce soit l’un ou l’autre, t’en aura besoin pour pouvoir facilement testé←→ajuster ta config et débuggé rapidement, genre les capteurs hall qui crament en pleine session, tu les désactives et il y a moyen que tu puisses quand même continuer à rouler. À ce sujet, je me demande si ton moteur supporterait bien le HFI, ce serait une très bonne idée pour fiabiliser le montage.
Bon ben 32 A tu vas te faire chier… j’avais ça sur ma Fatboard au début un soit disant 2800 W de trot Laotie et qui donnait 49 A sur VESCtool… résultat nul
En soi ils ne mentent pas, une laotie c’est du “60v” donc 16s donc 57.6v nominaux donc très exactement 2800W à 49A.
C’est bien de décharger c’est synonyme de couple mais à condition que 1/ les aimants soit assez puissant pour bien convertir le champ magnétique des bobines en couple et 2/ que le KV soit parfaitement placé sur le compromis couple/vitesse (durée de décharge) de la mchine et son utilisation et ça, c’est difficile à estimer dans le cas des hubs.
À savoir que l’ampérage donné par vesc tool et une simple estimation basée sur la résistance interne mesuré, selon une règle que j’ignore. La vraie valeur de décharge se trouve dans la limite de température (d’où l’importance d’avoir une sonde) elle même relative a la durée de décharge en burst comme en continu. D’expérience c’est une estimation “safe” et a condition que les aimants restent plus fort que le nouveau champ magnétique, il y a souvent moyen de rajouter un bon 40% voir 60% avec le genre de préparation moteur que j’ai énoncé plus haut pour contenir la chauffe.
Oui les 2800 W en 60V je suis d’accord mais j’étais en 12S et franchement le truc poussif … alors que le spinted c’est un bonheur même en 12S. J’ai eu des pics à plus de 100A
J’aurais pas la flemme de refaire la programmation j’essaierais bien de le passer en 16S. Par contre avec mon pack 18S de la Stooge j’ai peur de tout cramer
Multiplier sa capacité de décharge par 2.8 ce n’est pas vraiment ce que j’appelle perdre.
C’est bien ton étude, continue en déterminant le KV comme on a parlé plus haut :
compte le nombre d’aimants pour connaitre le nombre de pôles (une “ligne” de deux compte pour un)
Fait un test de vmax et relève les erpm-s au voltage considéré.
Convertie les e-rpm en rpm avec le nombre de pairs de pôle
divise par le voltage du test pour avoir ton KV.
Une fois le KV en poche, tu peux déterminer ta vitesse maximale théorique en fessant quelques math de base avec la taille de pneu/le voltage/le kv/le rendement moteur ou alors utiliser un calculateur tout fait si tu as la flemme. (en hub t’a évidemment juste à mettre le même nombre de dents dans les cases correspondant à la transmission). Ce calculateur va également t’estimer une valeur de couple moteur.
Et c’est là qu’il va falloir que tu fasses quelques recherches. Comme je l’ai dit, plus t’a de Vmax théorique, moins tu as de couple moteur. Or en onewheel et EUC il est important que le moteur garde une certaine possibilité de relance (donc du potentiel de décharge) même à haute vitesse (donc du haut voltage) pour te rattraper. Dit autrement, fonctionnement normal comme cas exceptionnel, il faut que la batterie ait toujours “assez” de voltage et “assez” de décharge en stock, à toi d’aller étudier quelle est la valeur des deux “assez” en fonction du KV de ton moteur car moi, j’en sais rien.
Prend ton kv moteur, les specs de la batterie de tes rêves, ta vmax, ton estimation de couple moteur et pose la question sur le discord vescify-onewheel
C’est le nombre de dents d’une transmission que tu n’as pas vu que c’est un hub.
23kv c’est probable, 71km/h en revanche ça me semble bien trop, j’aurai préféré un moteur de moindre KV mais peut etre plus gros pour si possible garder la décharge dans l’objectif de taper du 50-60kmh théorique. C’est bien suffisant pour une machine qui d’expérience ne dépasse que rarement les 35-40 réels.
Ça va rouler mais l’on peut s’attendre à une décharge élevée et relativement prolongée dans le temps ce qui n’est pas une bonne nouvelle pour la chauffe, l’autonomie et les relances.
Tampis pour les p42a de toute façon la 50pl est pour l’instant la meilleure cellule du monde, a moins que tu arrives à passer en 20S, tu ne peux de toute façon pas faire mieux.
Edit : encore une fois, je ne sais pas de quoi je parle concernant pour ton utilisation, va parler aux gens compétant.
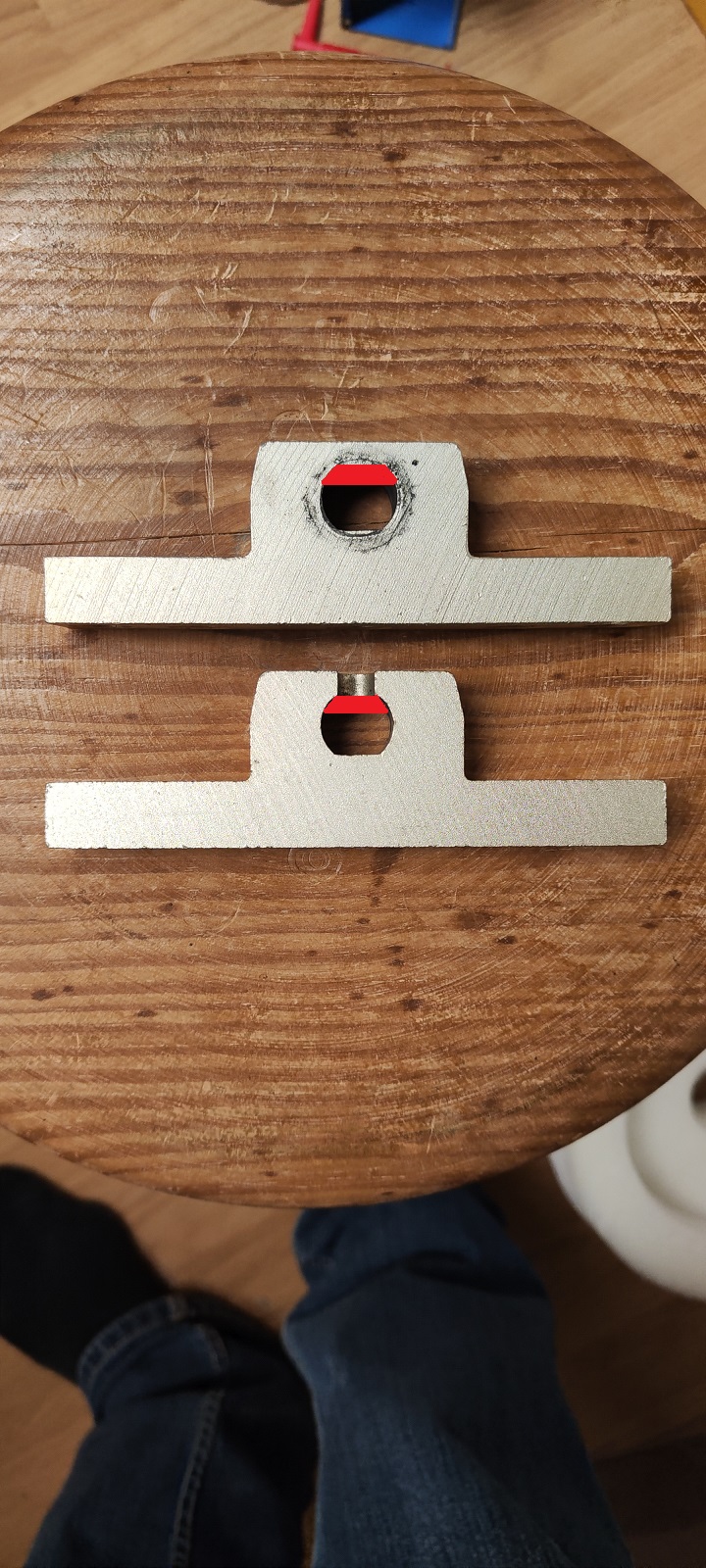
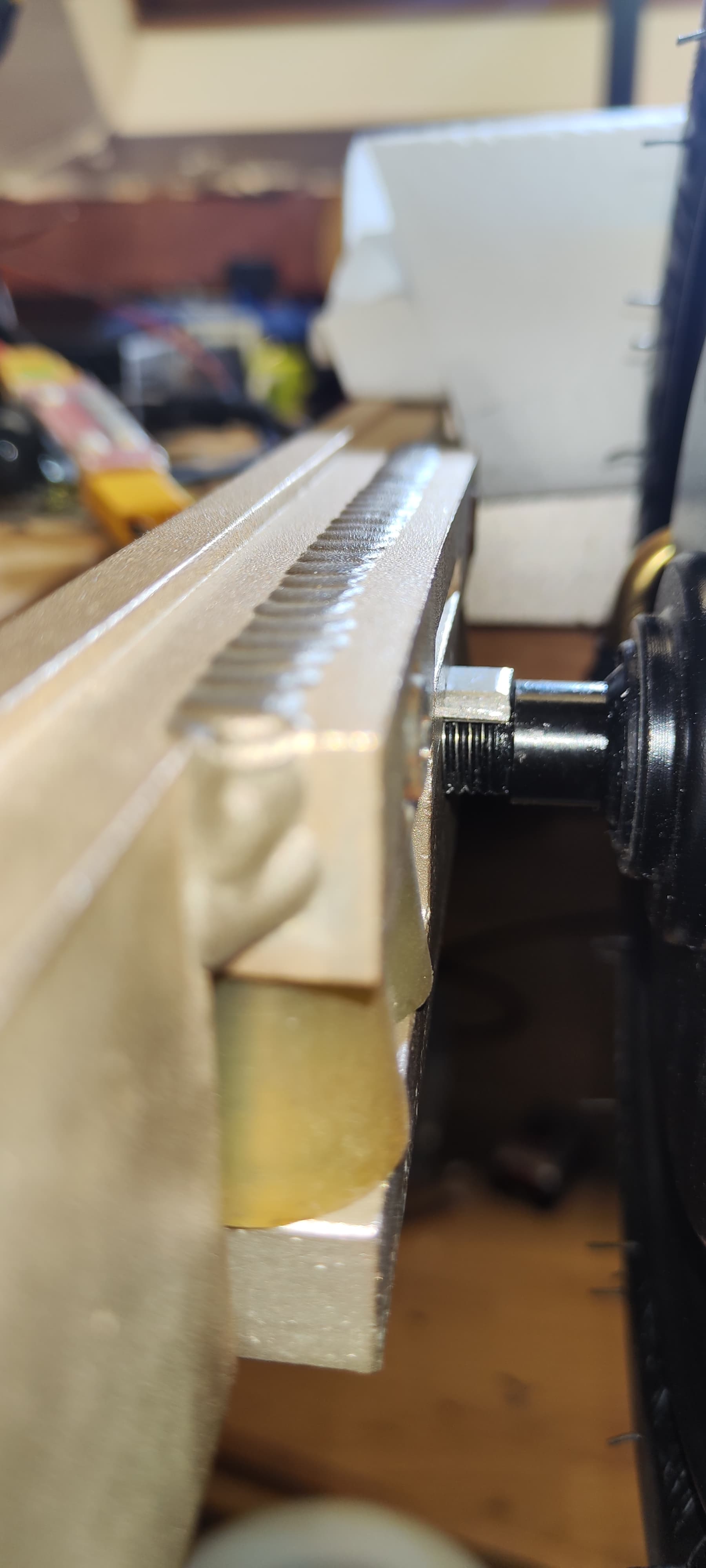
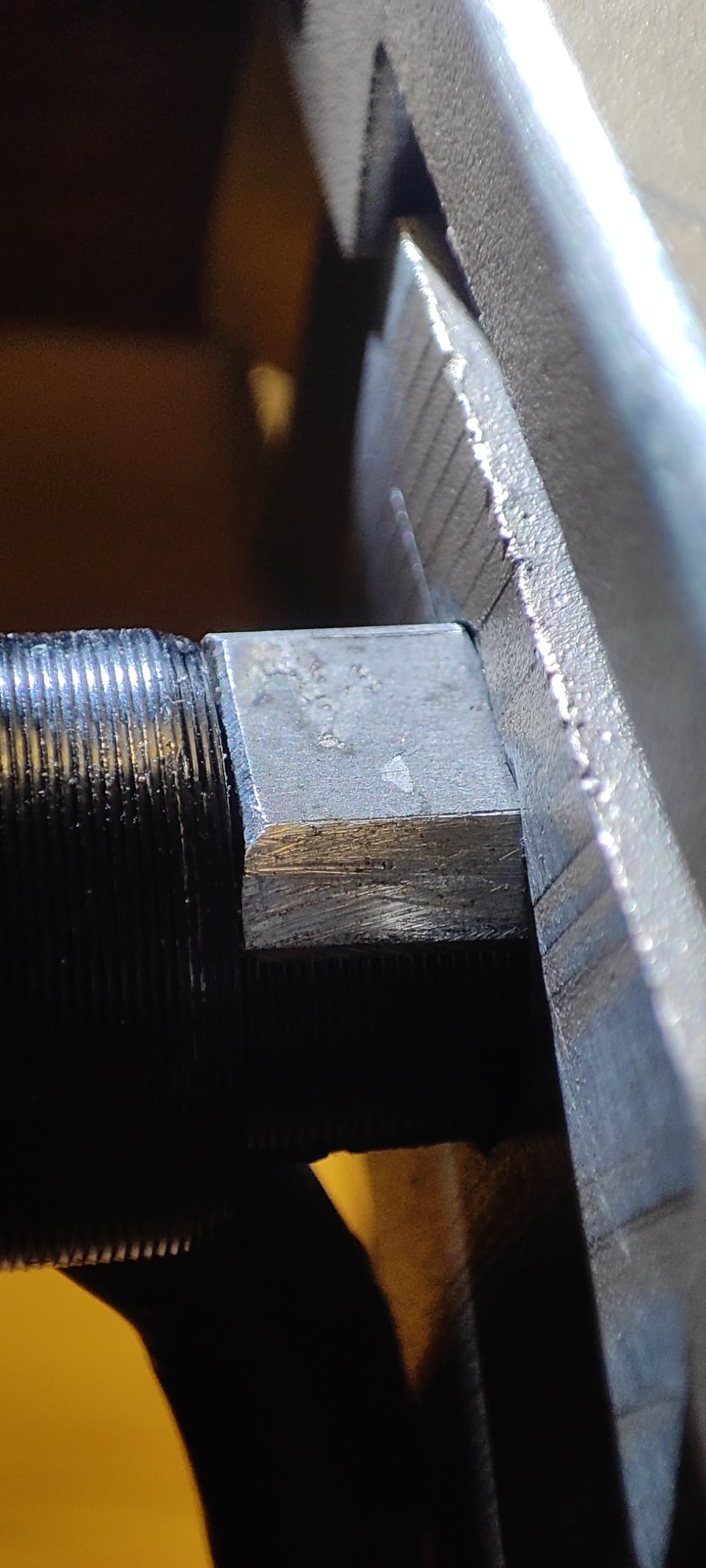
fabrication de 2 cales car le diamètre du support est supérieur au diamètre de l’axe du moteur
les cales font 3mm d’épaisseur et la longueur a été calculée en fonction de la butée du moteur et les rails, les deux longueurs sont différentes car il y a le trou du passage de cable.
En vrai il y a beaucoup d’offres de matos sur Leboncoin. Y’a un monde où t’arrive à te choper le hub floatwheel qui va bien et mettre ton vesc dedans avec un peu d’impression 3d abs ou petg.