C’est vraiment pas évident de faire une analogie thermique/électrique qui tient la route. En moteur brushless on a un couple quasi constant sur toute la plage de vitesse puisqu’il dépend du courant envoyé. Un moteur thermique ça n’a rien à voir, la courbe du couple est plus complexe et dépend des moteurs.
Je viens de recevoir mes engrenages de module 1.5. Une fois en main j’ai assez confiance pour un longboard avec des roues dures qui glisseront avant de casser une dent. Par contre je me vois mal monter ça avec des pneus de 8", c’est juste un ressenti, rien de scientifique là dedans.
C’est sûr que les courbes de couple/puissance ne sont pas du tout les mêmes et que ma comparaison a ses limites. Disons que ça tire long (sur le papier)…
J’attends de voir ta transmission avec curiosité… Quelle est la largeur de tes engrenages (j’ai un peu de place entre le bras et la jante… etencore une fois, Moe Stooge utilise des engrenages plutôt étroits)?.
Je suis bien d’accord avec toi, l’adhérence des roues limitera les contraintes dans les engrenages.
D’accord aussi pour les roues PU mais j’espere que tu surestimes l’adhérence des pneus 8", mal équilibrés, sans suspension, etc …
D’ailleurs, j’imagine qu’avec un esc/gps, il doit être possible de mesurer la puissance ou l’accélération et d’en déduire l’adhérence/traction.
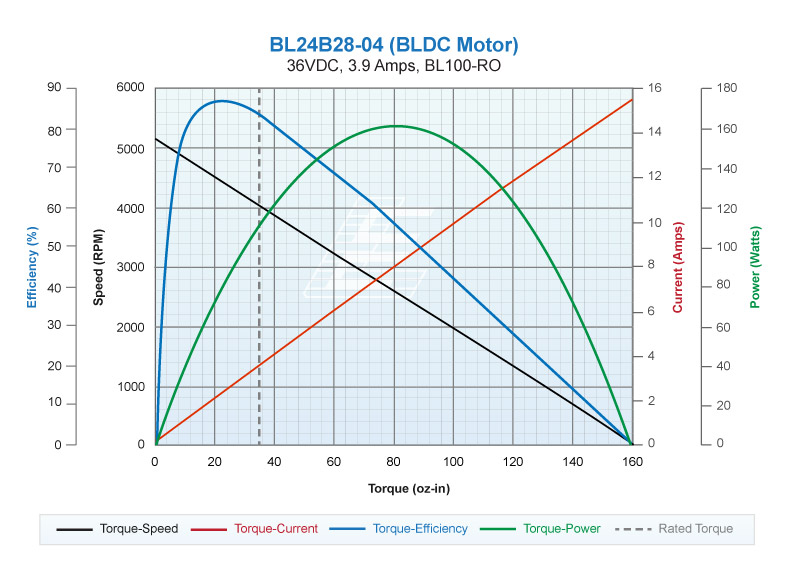
sur un brushless : couple max au debut de la rotation , et ça chute ensuite … pendant la chute de couple, et la montée en vitesse , on passe par un max de rendement … qui va influer sur la conso de batterie .
Je les ai pris chez tridistribution, les modules 1.5 font tous 17mm de largeur.
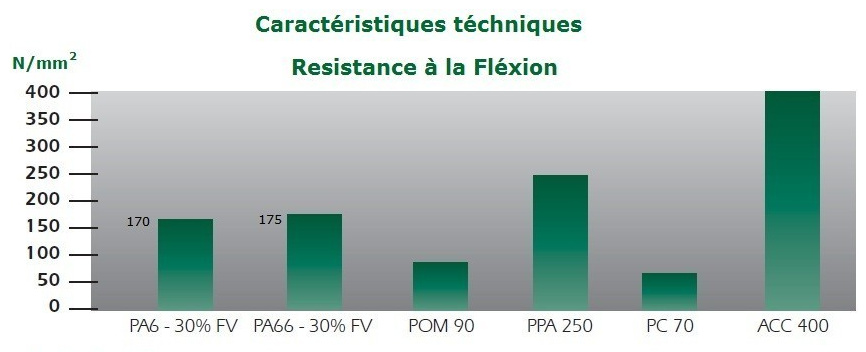
D’après ce que j’ai vu il utilise des engrenages acier en module 0.8 de mémoire. C’est forcement des engrenages à denture traitée pour tenir le coup. Si tu ne cherche pas la performance extrême et vu la place que tu as des engrenages plus gros en acier/pom ou acier/pa6 30 te feront gagner en silence. J’ai pris du pa6 30% pour la plus grosse roue, sa résistance est meilleure que le pom et sa température d’utilisation max plus haute.
on s’en fou pas mal en fait, tu ne dépasseras jamais le couple max de ton moteur. Enfin sauf si un cailloux bloque le moteur d’un coup mais les chances que ça arrive sont proches de 0.
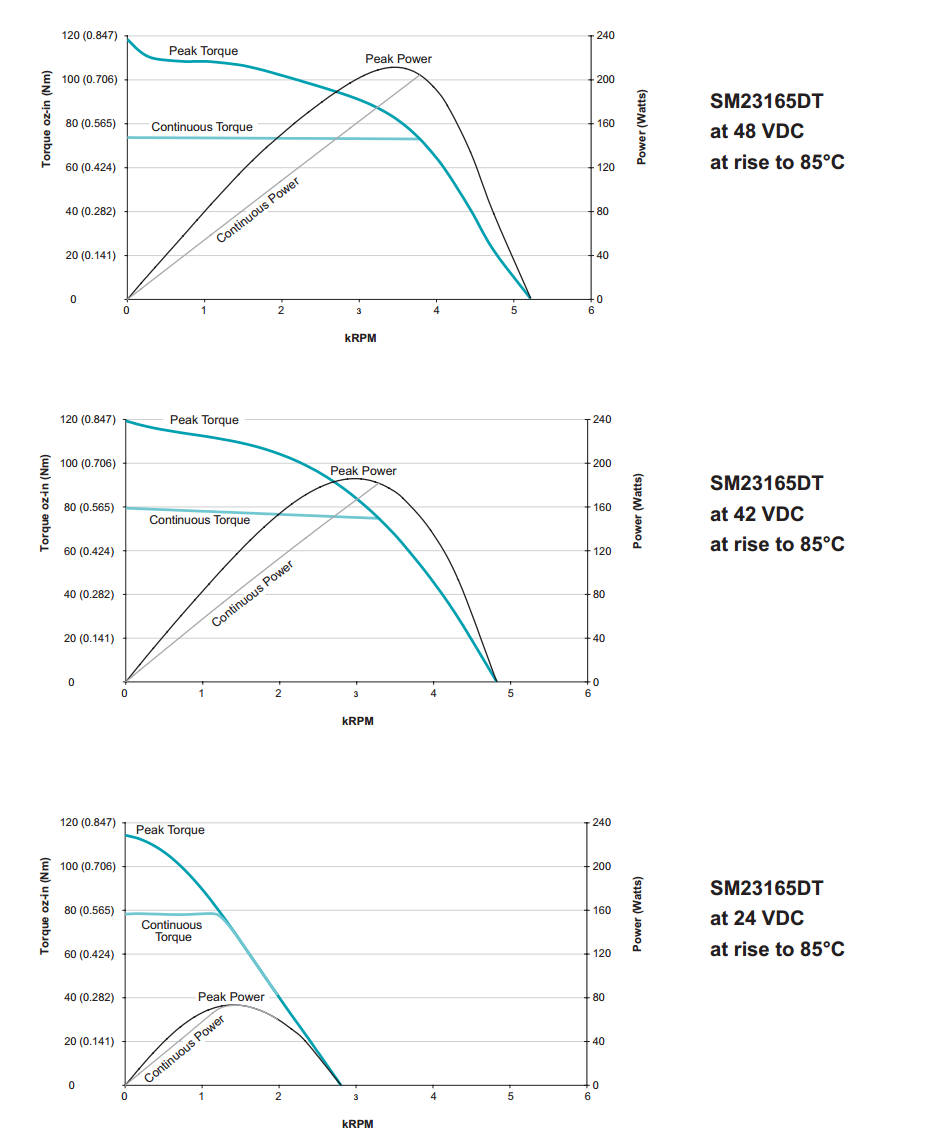
Merci pour les schémas, cela me ramène des souvenirs de jeunesse. Je serais curieux de voir les mêmes pour nos moteurs rc 55xx ou 63xx.
En gros, il faut utiliser le moteur en dessous de 75% à 80% de son rpm max (je ne savais pas que celà chutait autant au dessus) et avoir un couple continu x rapport de réduction cohérent avec le programme (genre monter un pente de 15%).
Merci pour tes conseils et pour l’adresse tridistribution, cela va m’être utile.
Entièrement d’accord pour la largeur des engrenages et le choix des matériaux, hélas, il n’ y pas toujours l’engrenage idéal avec module, largeur, matériau, diamètre axe, clavetage, surtout dans les petits diamètres…
Pour l’adhérence, je ne m’en fous pas du tout. D’abord parce que ce qui m’intéresse, c’est les planches et l’adhérence est fondamentale (et n’est pas simple à mesurer autrement).
Et surtout, parce que c’est ce qui limitera les charges sur les engrenages que je viens de recevoir et ils vont en avoir bien besoin…
Une fois reçus, ils ne sont pas bien gaillards…module à déterminer, 12mm de largeur, matériaux inconnus…
Je ne voulais pas le montrer avant essai mais comme ça vient dans la conversation, vous pouvez vous moquer…
J’ai souvent tendance à être optimiste/minimaliste sur le dimensionnement mais ici, c’est le résultat d’une méthode infaillible, le redneck design (j’ai grandi à la campagne…):
C’est une transmission de tronçonneuse et j’espere que nos roues ont moins de grip qu’une chaîne de tronçonneuse…
Vu comme ca, ca n’a pas l’air bien plus fragile que ceux des gear drive qui ne sont pas en planétaire.
Pour la fixation pignon axe moteur par contre va falloir mettre de la loctite costaude!
Un idée du genre oui , mais concernant la résistance, la couronne sert au démarrage l’engrenage est de l’autre coté, à part la compression il n’y a pas de résistance au démarrage non ?
J’ai mesuré rapidement sur la photo en prenant comme échelle le pneu de 200mm. Si je ne me suis pas planté la petite roue dentée doit faire autour de 20mm de diamètre, pour 11 dents ça fait un module proche de 1.5. Vu la couleur de la couronne je pense que la matière c’est du nylon non chargé.
Calculs :
En me basant sur les données de flipsky pour leurs moteurs de 4000W (6384) comme le tiens le couple max est visiblement autour de 9Nm. Maytech ne donne pas le couple max de leurs moteurs … donc on vas partir la dessus faute de mieux.
Module 1.5, largeur 12mm avec 65 dents pour la couronne (la flemme de compter mais pour avoir un rapport de 6 c’est environ ce qu’il faut).
Tu as 113MPa de contrainte dans la couronne !!! Or le nylon à résistance d’environ 85MPa donc tu vas déformer les dents de la couronne au premier gros coup de gaz. En gros soit l’engrenage ce bloque soit tu casses une dent, dans tout les cas c’est mort.
En l’état tu ne peux pas mettre un moteur avec un couple important.
Entièrement d’accord avec toi, sur le papier, c’est léger…
D’un autre coté, c’est pour un moteur de 2300W, sur un produit grand public, pour un usage plus violent (d’où mes interrogations sur le grip des roues), cela doit être bien surdimensionné…
D’un coté t’as une tronçonneuse “bas de gamme” de 2300W qui au pire ne marche plus si tu casses la pièce. De l’autre t’as une planche motorisée par des moteurs de 4000W avec toi dessus qui roule à 50km/h, et cette pièce participe de façon très active au freinage notamment
A toi de voir, tu peux essayer en roulant safe mais penses-y le jour où tu attaque une descente un peu violente.
Une tronçonneuse “bas de gamme” fait quand même 2300W et doit être très fiable sinon le service apres vente est ruineux…donc en général, c’est surdimensionné.
Le “décalage” entre les valeurs électriques et mécaniques est l’objet de toute mes questions, au sujet de la puissance réellement utilisée (si rapport de réduction inadapté) et ou du couple max, si limité par l’adhérence d’une roue de 8", qui n’est pas brillante.
Je connais bcp plus les planches et mes seuls moteurs, jusqu’à présent, ont été la gravité et le vent.
La gravité a l’avantage d’être simple à évaluer : 1000 W, c’est une masse de 1000N qui descend à 1 m/s, verticalement, soit un bonhomme de 100kg sur une pente de 10% à 10 m/s, assez proche d’un skater sur une belle pente (avec un parachute, sinon, ça va plus vite ).
J’ai un Flexscoot de 1000W, un poil limité pour etre vraiment fun, mais 2000W (réels) me semblent plus que suffisants pour une planche…
Idem pour le couple, s’il est limité par l’adhérence des roues, et j’ai peu d’illusions de ce coté. En tout terrain par exemple, l’adhérence limitera couples et contraintes…
J’ai enfin reçu ma batterie et je vais enfin pouvoir connecter et voir comment ça marche.
Comme je n’ai pas encore percé le trou pour l’axe moteur, ceux ci sont installés dans le taraudage pour la 2eme position de l’axe de roue (pour les roues de 9"). Au final, ils seront qq cm au dessus de l’axe de roue, en gros.
On entrevoit la couronne, entre la roue gauche et le bras.
 …
…

 , mais concernant la résistance, la couronne sert au démarrage l’engrenage est de l’autre coté, à part la compression il n’y a pas de résistance au démarrage non ?
, mais concernant la résistance, la couronne sert au démarrage l’engrenage est de l’autre coté, à part la compression il n’y a pas de résistance au démarrage non ?



