J’essaierai les hubs après (c’est nettement plus simple à installer) mais il me semble qu’ils pèsent un âne mort et/ou sont poussifs… (J’ai un hubmotor de 800w sur un de mes scoots mais il pèse ±6 kg).
Après, je testerai bien des roues PU (il y a des 120mm qui sont tentantes)…
Pour l’instant, je me concentre sur l’adaptation de ma planche pour y intégrer les composants électriques existants (et il y a de plus en plus) proprement.
Je n’ai pas trop d’illusions sur mes compétences en élec/électro (je comprends techniquement mais seulement pour utiliser/intégrer).
Pour les planches, j’ai un peu plus de métier et je ne cache pas que j’espere minimiser/intégrer la partie électrique pour pouvoir l’oublier et profiter de la planche : 1000 W contre qq (3?) kilos me semblent suffisant et préférables aux “tanks” que l’on voit souvent…
Après qq jours en mode “sœur Anne ne vois tu rien venir”, le camion DHL m’a finalement libéré et je vais pouvoir aller prendre une douche et acheter une baguette…
Plus sérieusement, après bcp de théorie sur les pages des forums,c’est un plaisir de pouvoir tripoter, observer, soupeser, rassembler les différents composants et avancer…
Cela reste encore statique et pas très électrique, vu que ma batterie se balade encore dans l’éther logistique…mais j’y crois!
Sur un EFlex, il y a une contrainte sur la longueur de l’axe moteur (>40mm), à cause de l’épaisseur des bras, donc le choix de moteur était limité : 6880 ou 5570 (pas de 63xx).
C’est pas possible d’affiner le bras localement en faisant une poche sur un diamètre 65 par exemple et insérer le moteur dedans ? ou mettre le moteur au dessus du bras.
C’est possible mais ça fait un usinage en plus et surtout, selon la position du moteur/transmission, c’est une partie structurelle du bras qui sera affectée.
De plus, à ce stade, je préfère conserver la largeur disponible pour avoir un bon guidage de l’axe moteur et maximiser l’effet heatsink.
Avec ces axes moteurs rallongés, je garde plus de possibilités pour installer le moteur/transmission. Et j’y verrai plus clair quand j’aurai un peu plus d’expérience avec les differentes possibilités…
On a beau essayer de préparer une belle structure, bien dépouillée, continue, symétrique…dès qu’on y rajoute du matos électrique, ça devient vite le bordel…
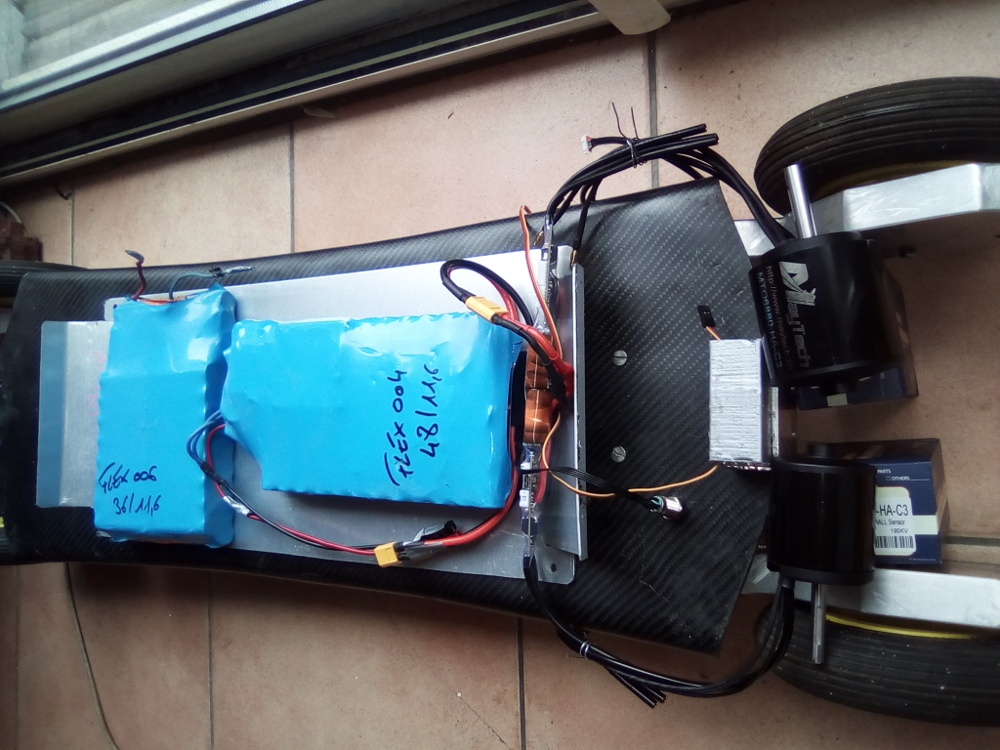
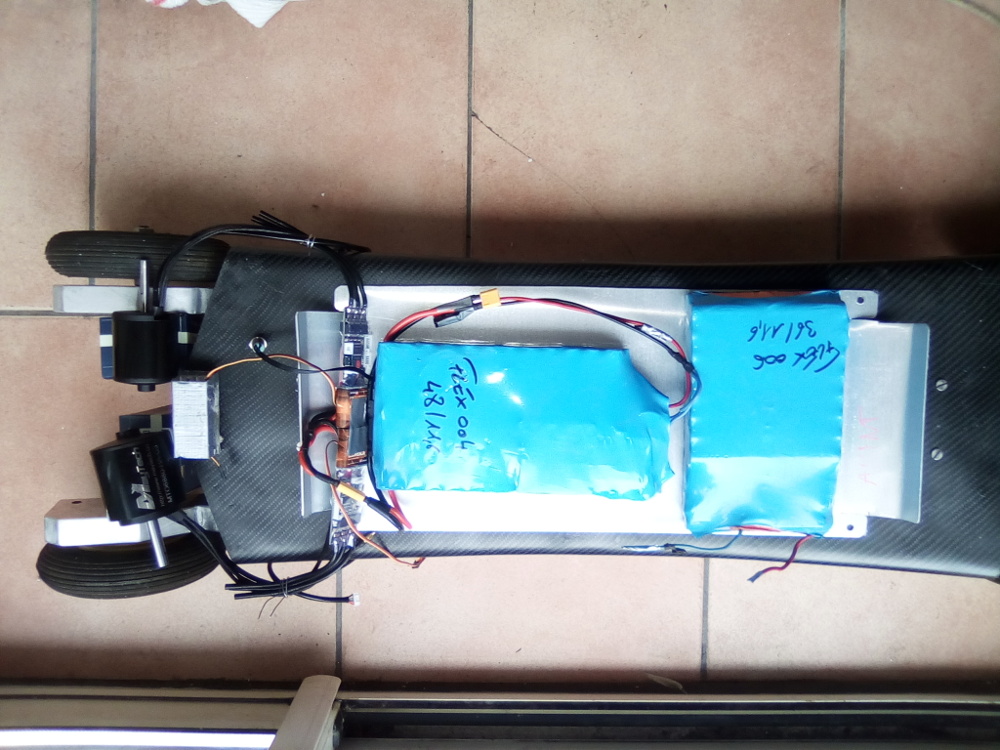
Ci dessous un premier essai d’implantation des composants, à l’arrache. J’ai posé le fond alu sur le deck, pour situer les choses et le passage, au dessus des tendons, des fils qui sont toujours moins souples qu’espérés…
Les moteurs, un de chaque dimension, sont juste “posés” sur les bras, qq cm au dessus de leur position finale (qu’il va falloir trouver…).
Les 6880 sont quand même bien massifs…
En attendant ma batterie (qui semble partie pour passer le nouvel an chinois loin de moi…), j’ai posé 2 vieilles batteries de mes Flexscoot, pour donner l’échelle.
Par contre, je n’avais pas commandé de Heatsink/ESC case, en attendant de voir, mais je pensais que les ESC avaient quand même un petite platine de fixation (vous voyez mon niveau électronique), pour faire pont thermique avec le support…
Quand à la “gaine plastique” qui l’entoure, celà semble limiter le refroidissement, non?
Si vous avez des conseils pour un fournisseur de heatsink, je suis preneur…
J’espere pouvoir installer les 2 Esc en travers, sur la partie oblique du fond alu, au dessus des possibles entrées d’eau, mais c’est quand même serré… Peut on commander des Esc avec des fils plus souples?
salut,
Tu peux peut-être regarder des esc de modélisme genre Toro150, Trackstar 150A ou autre.
C’est compact, tu soude toi même les câbles que tu as choisi, il y en a de waterproof et c’est pas trop cher.
Le soucis, tu es limité en 6S si tu veux des esc avec sensor.
Merci.
Ça rentre mais les fils ne sont pas très souples et j’aurais préféré avoir un peu plus d’espace entre les composants. Au pire, je plierai les fils, quitte à refaire l’isolant.
Les espèces de condensateurs, sur le cable batterie, prennent pas mal de place. Si je peux les faire pivoter à 90 degrés, ce sera nickel, mais il faut que je découpe la gaine plastique.
Quand on installe un esc dans un heatsink, on garde cette gaine plastique? El l’esc est tenu par des vis dans les 4 trous de la carte? (je pensais que c’était en contact avec les heatsink, comme un processeur de PC…)
Je pense que tu te focalises trop sur la dissipation de la chaleur, je te conseille de d’abord tester et de voir si ca chauffe avec l’utilisation
Je te conseille un module bluetooth pour suivre toutes les infos sur ton téléphone, c’est très pratique et facile à installer
Tu as raison et c’est même pire que ça : je flippe d’abord de la flotte, puis des vibrations et de la chaleur ( puisque tout est enfermé dans le plateau), bref de tout ce que je ne connais au sujet des pcb, de leur survie en milieu hostile…et qui pourrait compliquer mon bricolage.
J’ai cru comprendre que l’électronique, en général, était très fiable, dans de bonnes conditions (de température, vibration, humidité, poussière…) et en évitant d’abuser de la plage haute. C’est ce que j’essaie de réaliser .
Je vais me concentrer sur les passages de câbles et les “étanchéités” en attendant de recevoir la transmission.
Pendant que je bataille avec mes paquets de fils, en attendant ma batterie, voilà ce qui résume toutes mes E-questions et l’objectif du E-Flex:
-à droite, ce que je connais un peu, les hubmotors direct drive des Flexscoot avec 800W environ et …6 kg. Cela vient de l’industrie Ebike, c’est fiable, robuste et lourd, trop pour une planche.
A gauche, ce que je connais pas encore, le RC, léger, performant et moins fiable : 1800W (en théorie) et 1 gros kilo pour le 5070+7" et 4000W et2 gros kg pour le 6880+9"…soit un rapport poids/puissance 10 à 15 fois meilleur (à la louche), en tournant 10 fois plus vite(toujours à la louche), assez pour motoriser une planche sans en faire une enclume.
J’imagine que le secret est dans la réduction/transmission …
Cool!
Effectivement le couple au niveau de l’axe de ces moteurs est bien inférieur par rapport à des hubmotors costauds notamment à cause du bobinage différent et du coup à nos vitesses/tailles de roues, les transmissions vont de 1/2,5 à 1/5 voire 1/6 pour les setup mtb.
Pour les VESC: pas besoin de radiateur si tu les pousses pas trop, juste un flux d’air peut suffire!
Si tu veux, tu peux les étanchéifier avec du pshit magique dont j’ai oublié le nom, on trouve des vidéos sur youtube d’un hélico RC qui “vole” sous l’eau sans dommage.
plus un moteur tourne vite , plus les aimants passent vite devant les bobinages et plus il y a de rendement/puissance . d’ou la difficulté de faire des petites roues/hub moteur car elles doivent tourner relativement lentement . et donc aussi avoir beaucoup de paire de poles … et plus on en rentre (de poles), plus ils sont petits, les aimants aussi, donc moins de force . d’ou 'interet de demultiplier un moteur rapide …
Je commence par rétablir les faits et l’antériorité de Flexscoot.
Pour l’anecdote, Zuumer est seulement l’histoire de jolis qq protos (inspirés du streetcarver bmw) et vidéos avec blondes de service, en espérant lever une fortune auprès de venture capitalists de la silicon valley. Ça se faisait à l’époque…mais ça n’a pas marché. Fin de l’histoire.
Merci, je vais regarder le pshitt magique pour la flotte.
Coté refroidissement, j’ai le handicap d’avoir les esc dans un espace fermé, donc j’essaie de les connecter thermiquement au fond alu qui sera bien ventilé/refroidi.
Vu que ma batterie se promène toujours loin de chez moi, je peux continuer à fignoler les interfaces et papoter sur les forums…
Effectivement, trouver le sweetspot entre réduction mécanique et couple électrique minimum (directement lié à la dimension/poids du moteur), en fonction du type de ride, semble être le dernier mystère du Esk8…
Les rapports de réduction, sauf erreur de ma part, sont souvent inférieurs à 1/4, alors qu’un moteur RC atteint sa puissance max vers 8 à 9000 rpm (si j’ai bien lu les forums) et qu’une roue de 8" tourne à 1000 rpm à 36 km/h, 1500 rpm à 50+ km/h…
Il me semble qu’il faudrait un rapport de réduction autour 1/6 à 1/8 pour exploiter toute la puissance des moteurs RC…sauf qu’un engrenage de 80 dents environ a du mal à rentrer autour d’une jante de 8", à moins de réduire le module des engrenages : quasiment de l’horlogerie suisse sur une planche…
Mais si cela me permet de réduire la part/poids du E pour profiter d’avantage de la planche et du ride, je suis preneur.
Ça dépend du kv, beaucoup de moteurs montent beaucoup plus haut. J’imagine que ton moteur doit faire dans les 200kv pour être à ces vitesses à fond.
Une réduction de 1/6 me parait adapté pour aller jusqu’à 50km/h. C’est vrai que ça commence à faire de gros diamètres mais tu peux étager la transmission. Par exemple un premier étage de 1/2 et un autre de 1/3. Ça complexifie un petit peu la conception mais tu as plein de place sur tes bras par rapport à un longboard classique.
C’est tout à fait “les ordres de grandeur” que j’avais en tête, moteur autour de 200 kv, roues autour de 8", 50 km/h max… et un rapport de réduction autour de 1/6, ce qui fait une grosse différence avec 1:4.
Pour faire une analogie thermique, c’est une boite de vitesse sans premier rapport, accouplée à un gros moteur coupleux pour compenser (une Dodge?)
Effectivement, une transmission à 2 étages règle définitivement le problème du rapport de réduction et donne bcp plus de liberté pour positionner le moteur, en particulier pour des petites roues (avec les roues inclinables, le moteur doit être placé haut pour éviter de toucher en virage).
Je vais d’abord essayer de jouer sur le module des engrenages pour voir jusqu’où on peut réduire sans tout cloquer…si ça se trouve, ça passera…