une lipo a une résistance interne tellement faible , tu peux lui mettre tout le courant que tu veux elle va pas beaucoup monter en tension . aucun risque . faut juste adapter le current motor - à ton besoin de freinage . en mono moteur il risque d’être élevé pour freiner convenablement . encore plus avec ton hub à haut Kv .
mais je repete , il faut le gerer avec le current motor - et non avec le current battery - , qui occasionne une régulation plus brutale … not good en skate …
En fait y’a un truc que je ne pige pas dans ce que tu me dis :
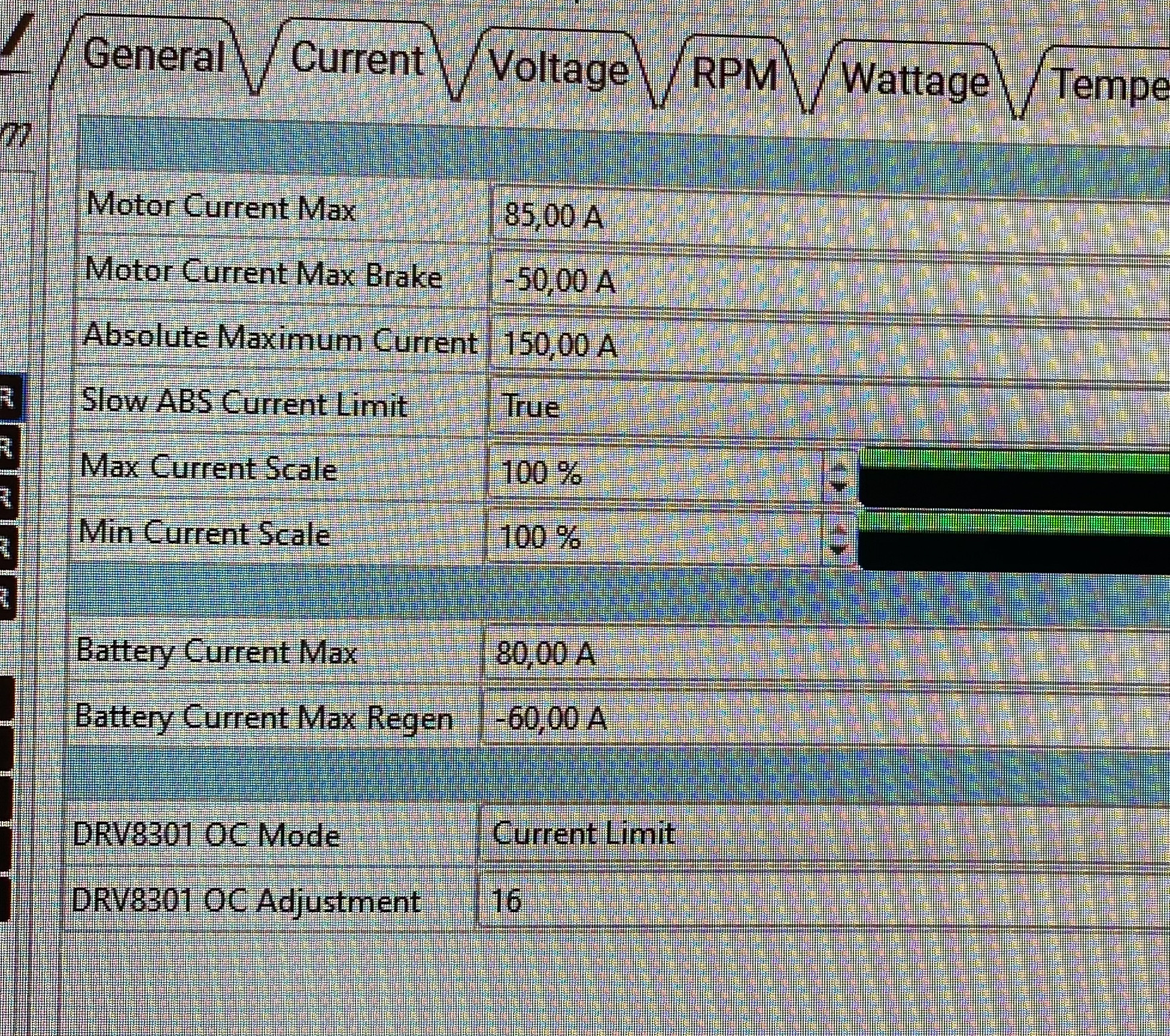
Si je récapitule, tu dis que le « Motor Current Max Brake » doit etre mis à une valeur inférieure à celle du « Battery Current Max Regen », pour que le premier seuil atteint en cas de freinage fort soit celui du « « Motor Current Max Brake » dont le déclenchement est moins agressif et dangereux que celui du « Battery Current Max Regen ».
Pour qu’un freinage ait lieu il faut que l’energie sortant du moteur soit dissipée/consommée. 2 moyens: soit disposer d’une resistance ventilée, soit renvoyer cette energie dans la batterie (Regen). Le « Motor Current Max Brake » est donc complètement dépendant de ce que ma batterie va pouvoir encaisser en courant de Regen.
La préco que je vois c’est 2C max pour le regen d’une lipo. Donc 2x12Ah = 24A. Je ne peux donc théoriquement pas mettre plus que « -24A » en valeur pour le « Battery Current Max Regen », et donc mettre un poil moins pour respecter ton conseil de seuil sur le « Motor Current Max Brake », dans les -22A… non ? (et c’est assez faiblard 22A, je sens que ça va pas être génial comme freinage… ).
Quelquechose m’échappe peut etre ?
Sauf si tu le dis que je peux mettre 60A ou meme plus pour le « Battery Current Max Regen »…? Et là je pourrai alors mettre 55A sur le « Motor Current Max Brake »
le vesc a 2 brides logicielles pour le courant max de regen : celui du moteur qu’il gère bien , et celui de la batterie qui semble être plus brutal . ça je ne l’ai pas expérimenté , mai vu/lu dans plusieurs forums , avec les phénomènes que tu as vécu en freinage .
considères que le « Battery Current Max Regen » est une sécurité pour pas flinguer le bms ou batterie . et tes lipo ne craignent rien sur un freinage .
de plus le courant moteur , c’est un vaste sujet , car c’est une valeur calculée entre les pulses de courant des mosfets et le duty cycle au moment où tu freines, le tout mixé sur les 3 phases donc ce courant est peut être loin de la réalité , mais convient au processeur . qui ne sait faire que des maths , et non du skate .
Dans un 1er temps , mets un gros courant de regen batterie pour pas être limité , et expérimentes plusieurs courants de regen moteur jusqu’à un freinage correct . ensuite ajustes le regen batterie par sécurité .
je viens de retester mon moteur d’hoverboard avec un vesc 6 . pour avoir les bonnes vitesses et ERPM , je dois mettre 15 paire de poles .
en pratique , j’ai 27 poles en ferraille bobinée sur le stator , et 30 aimants sur le rotor . donc il semblerait qu’il faille considérer le nombre d’aimants … c pas clair .
Concernant les poles, j’ai l’impression que Vesctools s’en fou… j’ai mis 15 au lieu de 14, et j’ai toujours un ERPM à env 14800 en monitorig temps réel à fond de gaz… on dirait que les 2 champs qui contiennent cette valeur sont seulement « informatifs… » alors que Vesctools indique que cette valeur est nécessaire pour calculer la vitesse.
c’est flou tout ça …
tu as vu apparaitre le nombre de poles lors de la détection ? moi jamais .
mets plus sur le batt current regen ., par sécurité, pour pas que ça déclenche sur cette valeur . c’est du courant calculé par le stm , on ne sait pas ce qu’il fait vraiment . ça craint rien
Tignous, le Flipsky 75100 est donné pour 100A, et j’ai un fusible de 100A sur l’alim generale du skate. J’ai donc du mal à imaginer mettre des valeurs supérieures à 100A dans la conf du Vesc … à moins que tu me dises que ce ne sont que des « pics » qu’encaissera le Vesc sans souci, (par contre le fusible risque de se déclencher non ? (Il s’est déclenché lors du dernier test sur un freinage avec une conf à -60A …bon par contre j’avais l’option de « Smart reverse » activée lors de ce test, et peut etre que ça a provoqué un pic de courant plus important… je l’ai désactivé depuis.
La technique pour voir les limites c’est de mettre une valeur improbable genre 999A qu’importe le paramètre puis de l’écrire dans le vesc. Il va t’afficher un message d’erreur et proposer de remplacer par la plus grosse valeur possible admise par le firmware. Dans le cas du 75100 ce sera 120 de batt et motor max. C’est déjà ca
ce sont des disjoncteurs electromecaniques . pas tres precis et sensibles aux vibrations . meme minimes . mets plutot un porte fusible auto avec un 120A et qq fisibles en spare . ça doit rester une sécurité si tout part en sucette .
il faut que ton batterie max soit supérieur a ton motor max.
j’ai dis 135 car sur mon spinted le firmware ne prend que 135. apparemment 120 sur le flipsky.
Cool!
Pour la suite tu vas essayer de changer l’angle des charnieres pour la roue avant?
Et sinon tu vas essayer de mettre un systeme modulable pour passer de une à 2 roues à l’avant ou ce serait un systeme définitif?
Merci , le feeling est sympas, mais sans plus… peut etre qu’avec un peu plus de confiance j’en profiterai plus à vitesse moy plus elevée… mais ça reste un engin bien moins stable qu’en 3 ou 4 roues, et dès que tu mets de l’angle assez prononcé tu te retrouve dans une situation ou ça peut basculer sur le côté, pas très plaisant/rassurant.
Pour ces raisons, je vais très probablement le passer à 2 roues sur le train avant. J’étudie les différentes manières de le faire. Le R.B. One est très inspirant, mais la technicité de son train avant ne m’est pas accessible … ça sera sûrement un truck ultra large équipé de 2 roues de pocket quad (comme la roue avant actuelle).
il faudrait peut être travailler sur le ressort . tu as trouvé le bon réglage en usage général , mais il faudrait un système progressif qui soit plus dur en fin de course ?. avec peut être une modif de l’angle des charnières …
c’est quand même un système simple , mais assez complexe .
Quand tu regardes le design du Speedboard, tout est à l’horizontale (charnieres, axes), j’ai fais pareil.
Ce qui stabiliserait un peu, je pense, serait que la planche soit un peu plus basse par rapport à l’axe de la roue avant, mais la garde au sol en serait trop réduite…
Le ressort de la Speedboard n’a pas l’air progressif, après tout peut se jouer sur la forme des fouchettes qui le tienne/tire…
C’est globalement fait pour « rouler », car a vitesse moyenne ça demande un peu moins d’effort d’équilibre.
Même sur les vidéos officielles du Speeboard, ils ne sont pas particulièrement détendus .
J’ai pensé un instant ajouter un axe qui viendrait en appuis sur la jambe arrière au niveau du haut du mollet pour aider à stabiliser nos chevilles qui sont loin d’être stables by design , mais ça n’aiderait qu’en inclinaison front side. En back side nos genoux ne savent pas se plier dans l’autre sens, donc ça obligerait à basculer la moitié de notre corps en arrière avec un tel axe sur le mollet.
Bref, pas très détente comme ride le speedboard quoi.
Un deck plus bas stabiliserait, mais faut passer la batterie dessus .comme.le 2eme proto de la vidéo piloté par madame. Mais du coup repenser la fixation des trains av/ar sur le deck .
Mais c’est quand même un peu ‹ auto-stabilisant › ? S’il n’y avait pas de ressort, ça part en butée ou ça reste globalement au milieu?
 .
.

 ).
).





 , le feeling est sympas, mais sans plus… peut etre qu’avec un peu plus de confiance j’en profiterai plus à vitesse moy plus elevée… mais ça reste un engin bien moins stable qu’en 3 ou 4 roues, et dès que tu mets de l’angle assez prononcé tu te retrouve dans une situation ou ça peut basculer sur le côté, pas très plaisant/rassurant.
, le feeling est sympas, mais sans plus… peut etre qu’avec un peu plus de confiance j’en profiterai plus à vitesse moy plus elevée… mais ça reste un engin bien moins stable qu’en 3 ou 4 roues, et dès que tu mets de l’angle assez prononcé tu te retrouve dans une situation ou ça peut basculer sur le côté, pas très plaisant/rassurant. … ça sera sûrement un truck ultra large équipé de 2 roues de pocket quad (comme la roue avant actuelle).
… ça sera sûrement un truck ultra large équipé de 2 roues de pocket quad (comme la roue avant actuelle).