En fait au départ j’ai juste basculé en mode BLDC pour « voir » si ça changeait quelquechose: je n’avais alors plus cette coupure lors de l’acceleration brutale, en bldc. Ça ne tournais pas tres rond car c’était avec les parametres de detection en FOC… j’ai donc fait le Wizard « other motor » en bldc pour tester proprement.
Ça tournait nickel, bien plus bruyant (pas de grognement mais simplement le signal bldc est bruyant comparé au foc).
J’ai ensuite refait le wizard « other motor » en mode FOC, et nickel: silence et plus aucun des phénomènes bizarre ne se produit.
Quelques conseils que j’ai trouvé après coup sur cette page:
Impressions:
Meilleure stabilité à basse vitesse (il me faut tout de même encore durcir ce ressort pour que la direction soit encore plus stable)
Meilleur puissance, mais manque de patate au démarrage… j’ai bcp de puissance pour passer de 25km/h à bien plus (pas mesuré mais ça trace… suis pas allé au max mais probablement dépassé les 45km/h). Soit c’est le moteur qui provoque ce démarrage poussif, soit il faut que j’ajuste le Vesc Flipsky dans VescTools…
Le freinage fort déclenche mon fusible 100A réamorçable, donc là aussi faut que je tune ça.
Sinon bon kiff, surtout par ce soleil hivernal de fin d’aprem .
la patate au démarrage , c’est le Imax motor ( et battery) dans vesctool . Si ça n’arrange rien , c’est que ton moteur a un Kv trop haut
et/ou bobinages trop résistifs , donc à part augmenter la tension batterie pour avoir des pulses de courant plus élevés dès le démarrage , pas de solutions .
fais un log dans vesc tool , pour voir si tu atteinds le courant max spécifié , sur un démarrage violent ou en cote a fond en basse vitesse . si tu restes en dessous de Imax , c’est ton moteur/tension batterie qui limite .
ça a l’air de bien tourner et assez stable .
Le maniement me rappelle un build où j’avais mis 0 angle sur le truck arriere , et beaucoup d’angle devant . très agréable à partir de ~15Kmh , en dessous , peu maniable .mais toi , tu as l’équilibre sur 2 roues à gérer.
durcir le ressort OK , mais mettre un peu d’angle sur les charnieres ( comme la chasse en voiture , ou angle d’un truck) permettrait de stabiliser naturellement , sans brider le ressort qui va te pénaliser à tres basse vitesse ?
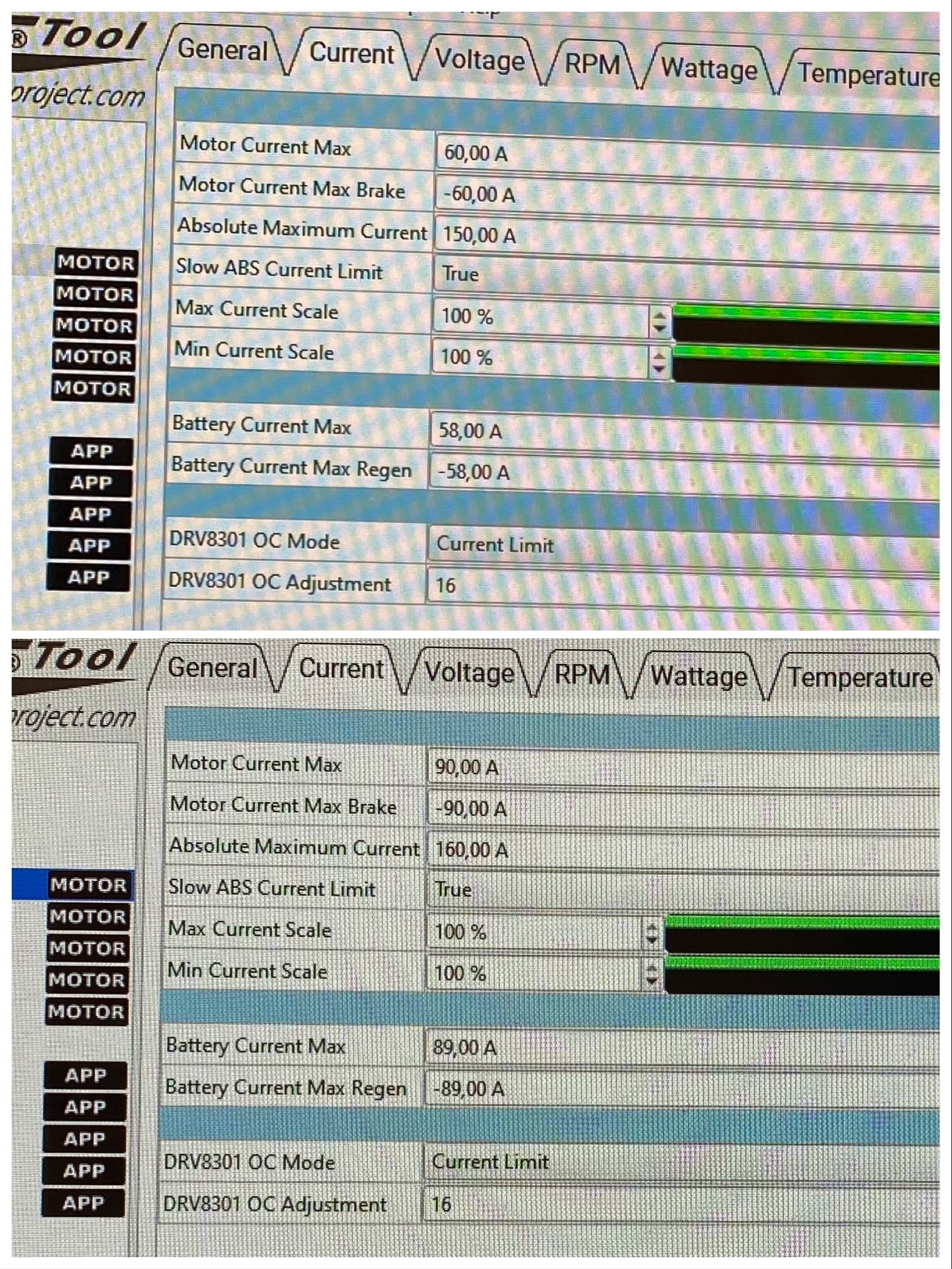
Et en bas de ce screenshot ce sont les valeurs que je viens de programmer, mais pas encore testé.
Motor Current Max: 90A
Battery Current Max: 89A.
Je trouve ces valeurs assez exhorbitantes tout de même… je ne vais pas cramer le moteur avec de tels courants ? (Combien supporte un tel moteur ? car théoriquement: Imax = 1500Watt / 50V = 30A …
Je suppose que les max qu’on set ici sont des pics, donc probablement supportables sur de courts instants ? (mais ça reste élevé…)
Pour le freinage j’ai désactivé la fonction (bien qu’interressante) du Smart Reverse, car c’est elle qui provoquait un décrochage du freinage très destabilisant (probablement à cause de mauvaises valeurs de courant max precedentes… mais bon faisons simple au début. J’ai testé roues en l’air et le décrochage a disparu donc à tester en charge. Je ne sais pas si c’est ce smart reverse qui a provoqué un pic de courant lors du freinage fort qui a fait sauter mon fusible 100A… en tout cas c’était pas rassurant
Pour la puissance au démarrage: j’ai modifié la courbe de la manette des gaz (j’avais mis -50% pour ce test 2, je suis repassé à 0% d’influence de la courbe ce soir, et j’ai fait un mini test dans mon bureau , et ça semble bien mieux. A voir en vraies conditions dehors.
Tu fais bien ! Ca t’évitera de te crouter comme moi
Vérifies aussi le ‹ duty current limit ’ a 85% ›. Ca évitera des délires du moteur proche de sa Vmax à faibles courant…
Pour le freinage, n’oublies pas que tu as un seul moteur. Pas comme ton 4wd.
c’est dans motor>general>advanced>« Duty Cycle Current Limit Start » à 85%
et Motor>General>Rpm>« ERPM Limit Start » à 85% . ce paramètre agit sur le « Max ERPM » que tu as défini .
Ouais je les ai vu, mais mon max eRPM est actuellement réglé à 150 000 je crois, et je ne sais pas trop quoi mettre à ce niveau…
Pour ne pas avoir de mauvaise surprise à pleine vitesse (comme tu as eu) il faudrait mettre quelles valeurs pour:
le erpm , c’est les tr/min vu par le vesc … qui ne sais pas quel moteur tu as .
en fonction de la Vmax souhaitée , tu détermines les tr/min correspondants , et tu multiplie par le nb de paire de poles . ça te donne l’erpm max .
a savoir que la vitesse max. naturelle du moteur va diminuer avec la décharge de la batterie . mais il semble avoir un Kv assez haut car prévu pour du 65Kmh ?
erpm max : calculer à ta vmax souhaitée en fin de décharge batterie
Current Limit Start et ERPM Limit Start : 85% c’est safe .
Le but est d’éviter d’avoir le moteur à fond sans limitation avec un courant faible ( légère descente? ) et le vesc qui a des aberration de lecture de courant , car dans ce cas il assez faible et ça peut délirer… ou pas.
certains ont fini à l’hosto ou dans un platane .
moi le vesc 4 me faisait des accel/frein surprise dans ce cas…
Merci Lurch , intéressantes infos.
J’ai observé via VescTools avec les données temps réelles activées, qu’il plafonne à un ERPM de 14800 environ avec les batteries bien chargées, roues en l’air.
En suivant ce que tu m’indiques:
Vu que c’est un 14 poles (15 poles d’après le fiche Aliexpress…), ça fait 7 paires de poles.
Donc théoriquement: Max RPM = 14800/7 = 2114 RPM
Ma roue moteur fait 26cm de diamètre.
Ceci donne une VMAX de: 3,14x26x2114x60/100000= 103Km/h…
Ce moteur est donné pour 60km/h roues en l’air… y’a un facteur 2 qui traine…
mon calculateur dit pareil . ~100kmh pour 2100tr/min et roue de 10" 26cm
pour une 12s à 48V , ça donne un Kv de ~40 . c’est haut pour un hub .
un d’hoverboard avec son Kv de 19 roule a 33kmh en 48V .
tu es sur du nombre de poles ?
pour etre à 65Kmh avec une roue de 10" et une batterie 12s , il faut un Kv à 30 .
Si prends la chose à l’envers et pars des specs du vendeur:
Vmax roue: 60km/h
Puissance max: 1500W
Tension max: 48V
Diam roue: 26cm
Ça me donne un RPM à : 60 000/ (3,14x0,26)= 1250.
Donc un ERPM à: 1250 x 7 = 8750…
J’ai aussi un KV à: 1250/48 = 44
Nb de poles: VescTools m’en détecte 14, la fiche descriptive du vendeur indique 15… je me demande si je ne vais pas tenter de les compter avec un aimant proche de la roue…
vesctool ne peux pas compter le nb de poles ? c’est toi qui le renseigne ?
avec ton aimant il faudrait enlever le pneu pour etre perpendiculaire aux aimants du rotor . sur le coté ça va pas fonctionner .peut etre avec une boussole .ou le capteur magnétique d’un smartphone ?
et tu va compter les aimants . y’en a plus que les poles …
Ça ne m’enchante pas de le démonter (le cablage est intégré à la birde sans marge pour sortir la roue, donc je reserve ce demontage à une crevaison .
Il me semble que 14 poles est très répandu sur les « outrunners » c’est ptètre pour cela que VescTools a cette valeur par défaut.
Je vais mettre en priorité des valeurs de courant de Regen Batterie Max de -24A (2C conseillé), plutot que le gros -95A que j’ai mis hier .
Donc pour le Motor current max brake je vais mettre -22A.
Pour le pax erpm, j’essayerai de détecter les poles (pas con la bousole )
pour les courant s +/- batt , tu peux mettre beaucoup plus ques les +/- moteur . c’est surtout pour pas faire declencher un bms capricieux .
c’est donc le I- moteur qui va déterminer ton freinage . à tester en roulant , et ajuster jusqu’a trouver une valeur satisfaisante . pareil pour le I+ motor , il va determiner la force de demarrage et accel en cote à basse vitesse. il peut être amplifié par la courbe de la remote.
pour les 15 poles , c’est possible . c’est multiple de 3 ( 3phases, 3bobinages…) du coup ça ferait un 7,5 pour les paires de poles …
ce confort des pneus gonflables,ça te donne pas envie de percer tes pneus de hummer ?
Je viens de faire un test avec deshubs d’hoverboard en pneus pleins de 8" . c’est inconfortable au possible en skate
")




 , et ça semble bien mieux. A voir en vraies conditions dehors.
, et ça semble bien mieux. A voir en vraies conditions dehors.
 ou dans un platane .
ou dans un platane .


