sur mes hubs , je fais systématiquement la détection en small,médium et big outrunner , et je vois la cohérence avec la détection manuelle en FOC . l’important , c’est la résistance , self , et flux linkage qu’l faut parfoi retoucher manuellement pour que le moteur ne grogne pas . ( en ride ) . le courant max peut être ajusté manuellement ensuite en fonction de la batterie …
Merci les gars pour vos pistes, je regarderai cela.
Ce moteur est donné pour 1500 Watts. Je suis en 12S, donc théoriquement I max = 1500/45 = 33 Amps.
Je pense que je mettrai 50A max dans la conf (le Vesc 75100 encaisse 100A max visiblement), car on doit pouvoir en tirer 2250W facilement non ? (mes hubs d’hoverboard montent à 1500W (sont donnés pour 400W…).
Je ne savais pas qu’il y avait un wizard « Remote ». Faudra que je regarde ça. Merci pour les pistes sur les modes « duty », « current »,… je vais creuser ça 
1 « J'aime »

Autre chose qui m’a bien sidéré sur le Flipsky 75100:
-
en tapotant sur le boitier j’ai senti des vibrations. Je démonte, et je découvre 3 gros condos soudés sur des pates de 2cm de long, non fixés => ils oscillent dans le boitier… génial pour que ça se désoude avec les vibrations de nos engins.
-
pire encore: le carte pcb du 75100 est moins large que le rainurage interne du boitier ! résultat le PCB n’est maintenu en place que par les transistors dont le radiateur est visé sur le boitier !… et pour couronner le tout il n’y a aucun isolant electrique entre le boitier alu et le PCB => la face inférieure du PCB finira par faire contact avec le boitier, et se court circuiter.
-
cerise sur le gateau: aucun joint d’étanchéité sur les faces amovibles du boitier, bref c’est une passoire (meme les boitiers e-bike à 9€ d’aliexpress sont mille fois mieux de ce point de vue.
La seule chose positive, côté conception, sur ce 75100: l’electronique a l’air soignée sur la PCB.
Donc gros warning sur la fiabilité dans un environnement vibrant (type d’environnement qui est la cible de ce type de boitier !).
J’ai donc ajouté des plaques de protection (bleues sur les photos) pour caler tout ça et protéger un temps soit peu de courts circuits.
C’est quand même effrayant et sidérant à ce prix.
2 « J'aime »
yes . j’ai vu dans d’autres forums que certains avaient une mauvaise finition… à verifier …
Suis passé en mode Duty au lieu de Current dans la partie « App » de VescTool, j’ai aussi mis une courbe d’accel à -100% exponenielle, et la j’ai un controle bien progressif  , merci encore !
, merci encore !
Vesctools a visiblement détecté 14 poles sur ce moteur, c’est possible ?
Comment savoir combien de poles a un moteur ? 
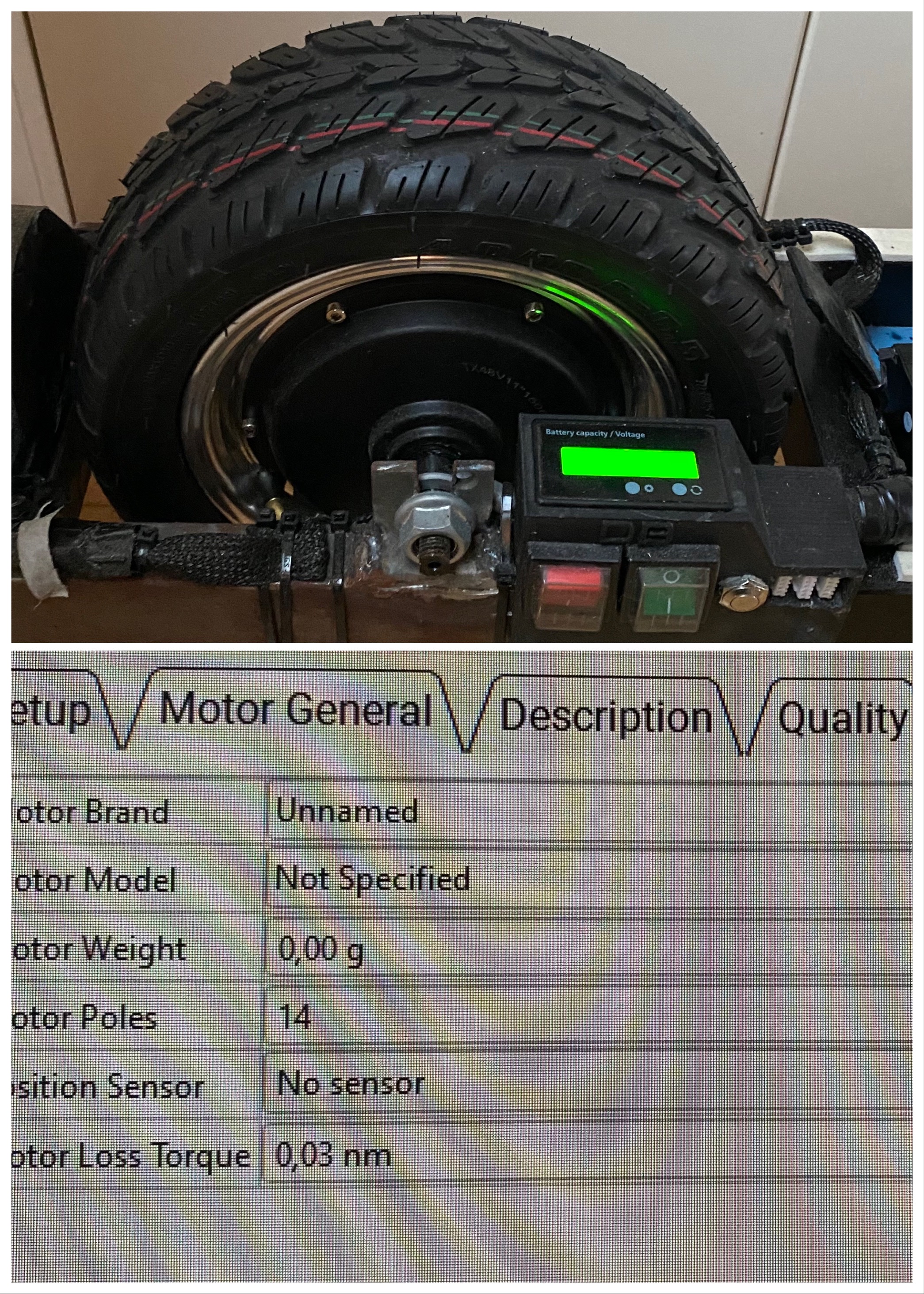
pour savoir: soit t’as une fiche technique du vendeur/fabricant, sinon tu démontes et comptes 
Si ca vibre pas, fume pas et fait pas de bruit en charge c’est que ca doit etre bon!
t’as pas branché les capteurs hall?
Sisi j’ai bien branché les fils Hall, curieux qu’il indique « No sensor »…
Je viens de lire « 15 poles » dans la fiche descriptive du vendeur. C’est pas supposé être uniquement paire le nombre de poles ?

Cest bien pour les tests . En utilisation vaut mieux le mode current With brake.
Pour les hall ,faut vérifier le brochage du moteur …3.3V ou 5V d’alim…après le vesc se demerde pour l’ordre des hall.
Enfin, prête pour son premier test, prévu demain (s’il ne flotte pas ).
Changelog:
- Fixation du feu arrière
- Contrôleur Flipsky 75100 en place
- Remplacement des charnières de direction par charnières à roulements à billes
- Création du système de rappel au centre (via ressort) du train avant + butées de sécurité de braquage max.
- Peinture
Il me reste principalement à faire:
- 2x garde boues
- étanchéité extrémités du surf
- éclairage avant et dessous.
Hâte de faire le premier test, non sans une certaine appréhension, mais en statique ça réagit bien sur le train avant, donc j’ai bon espoir  .
.


3 « J'aime »
tu as trouvé pour le nb de poles , et les capteurs hall ?
Non pas encore cherché, mais je dois me pencher sur les reglages du Vesc car là la board a la puissance d’un bulot…
DeflectBoard - 1er test
J’ai profité d’une petite éclaircie dans ce temps bien pluvieux, pour faire un rapide test de la DeflectBoard ![]()
Sensation vraiment sympas, très coulé. Il faut que je durcisse la direction avec un ressort plus dur pour qu’elle tourne moins facilement, je gagnerai en stabilité. J’ai encore pas mal de boulot côté tuning du Vesc (il a la nervosité d’un bulot séchant au soleil pour l’instant ![]() ).
).
Bref c’est encourageant pour une toute première version, et surtout un 1er ride dessus ![]() .
.
Petiote video pour illustrer le test:
")
4 « J'aime »
Ca a l’air de bien tourner …
bizarre ton vesc . ton moteur à 1500W/48V prends~30A . tu as mis combien en Amax dans le vesc ?
peut être un Kv trop haut , car il peut aller à 60Kmh , du coup moteur mou à bas rpm en consommant beaucoup ( mauvais rendement , j’ai le cas sur mon skate 4WD avec des hubs de Kv 70 avec des pneus 6" .)
tu as fait des tests roue en l’air ? quel Vmax ? ou rpm ?
Oui il faut que je reconfigure tout (deja repasser en mode torque je pense… là je suis en Duty…
J’espere que ce n’est pas à cause du moteur… à 200€ la bête ca me ferait suer…
J’ai refais des tests moteur (en statique pour l’instant), et j’ai résolu les souci suivants:
-
lorsque j’accelere de 0 brutalement ça accelere une seconde, puis ça coupe, pour ensuite reprendre. Coupure à environ 30A.
-
À basse vitesse ça grogne un peu, avec un palier de vitesse à partir duquel il n’y a plus de grognement. Pareil pour le freinage (je l’avais vécu en dynamique dimanche (frein qui lache 1 sec, assez déstabilisant).
Je me suis repenché sur VescTools. En passant en BLDC au lieu de FOC je n’avais plus ces coupures.
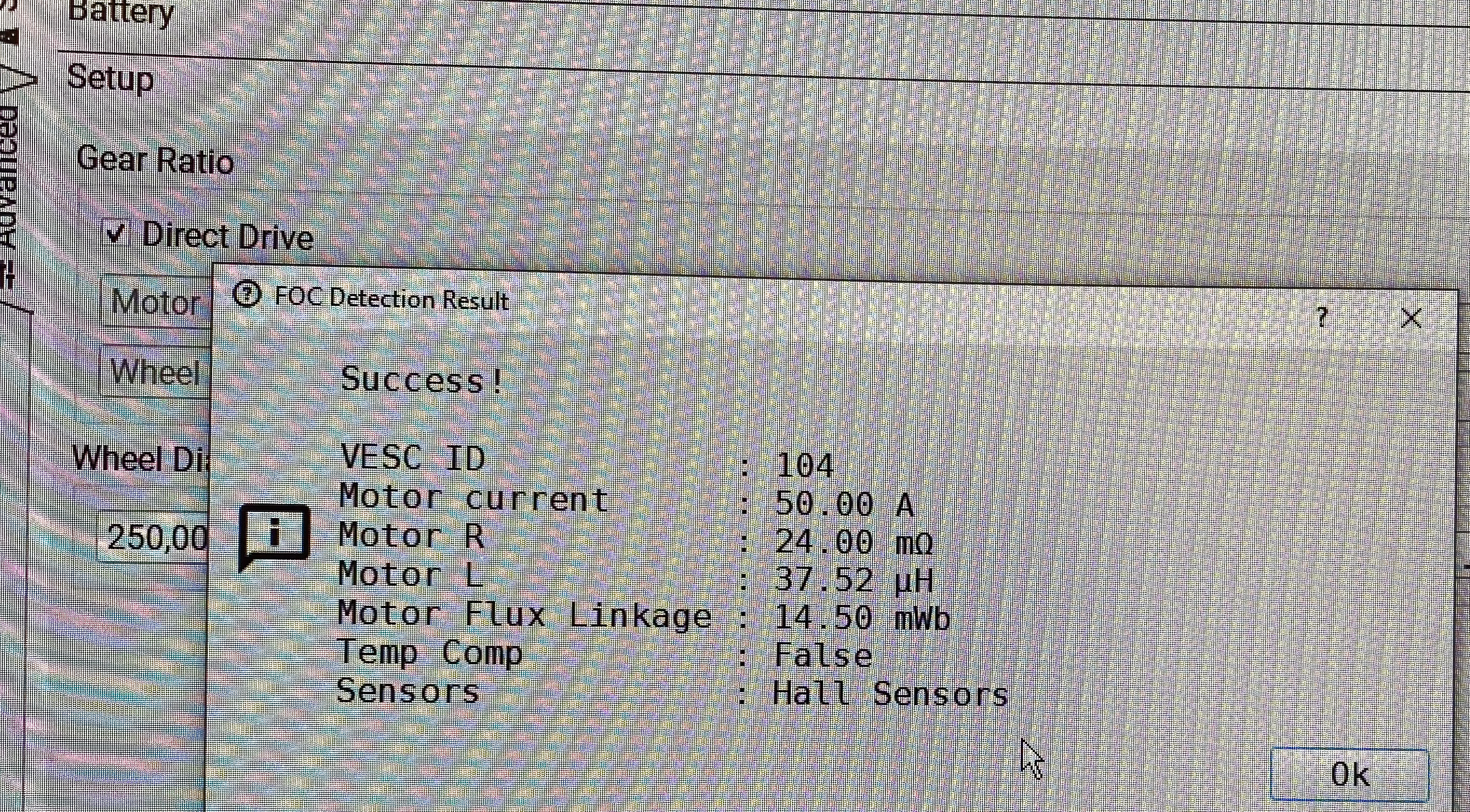
Au final, j’ai utilisé le Wizard de conf moteur « Other motor » qui est un peu moins assisté, et maintenant je suis en FOC et tout semble bien fonctionner (acceleration soudaine sans souci de coupure, freinage pareil, silencieux (pas de grognement) .
Bon pour l’instant ce sont des constatations en statique avec simulation de charge (frottement du pneu avec ma chaussure , donc ça mérite un bon test dynamique pour être validé/affiné.
Concernant les cables Hall: curieusement en sortie des 1ers wizards j’avais le champs Sensor à None dans les infos du menu Motor… que j’ai passé manuellement au statut « Hall sensor » pas noté de changement de comportement. En sortie de detection moteur les hall sont mentionnés, je ne sais pas dire si cela signifie qu’il les prends bien en compte ou si c’est juste une info (cf capture). Comment pourrais-je m’assurer qu’il les prends bien en compte ?
En les débranchant  voir si ça deconne.ou genere une.erreur …
voir si ça deconne.ou genere une.erreur …
Ennfait le vesc utilise les hall au demarrage jusqua une certaine vitesse et passe ensuite en sensorless. Cest la transition que tu as remarqué. Tu peux l’ajuster manuellement pour affiner lz fonctionnement…
Jai déjà essayé en sensored foc jusqu’au régime max ,ça fait un bruit degueulasse  . Contrairement à un esc chinois qui les gère sur tout la plage de régime…
. Contrairement à un esc chinois qui les gère sur tout la plage de régime…
C’est bon, lors de la detection semi manuelle il m’a trouvé les positions des sensors donc ils sont bien connectés
(Oui je me doute qu’en les débranchant ça aurait aidé au diag  , mais j’avais la flemme de démonter le surf qui renferme tout
, mais j’avais la flemme de démonter le surf qui renferme tout
J’ai pesé la bête: 21kg  je ne fais pas dans la dentelle…
je ne fais pas dans la dentelle…
1 « J'aime »
et ça ? c’est résolu ?