Ah oui, c’est difficile de passer à côté !
Je vais voir ce que ça donne, et je changerai d’ESC si besoin !
Je ferai une vidéo quand ça marchera bien !
Ah oui, c’est difficile de passer à côté !
Je vais voir ce que ça donne, et je changerai d’ESC si besoin !
Je ferai une vidéo quand ça marchera bien !
Pour le moment, uniquement avec le frein moteur :s
Je devrais mettre une protection autour de la fourche, la mienne est déjà pas mal poncée !
C’est pas gênant le boitier au niveau du mollet ?
Moi aussi j’ai joué avec le FOC en 12s sur un 4.12 au début… ça a marché nickel 400km puis erreur DRV. C’est vicieux parce que ça crame pas tout de suite donc on se dit que ça passe mais ça fini par cramer.
Au diable l’avarice, j’ai commandé un FSESC 6.6 …
Pour le boitier ca va en fait, au debut je le mettais au dessus des batteries mais c’était pas top avec tous les cables. Pour les protections c’est du tuyau souple pour plomberie, coupé dans la longueur!
et ca y est j’arrive a faire des tours de ma résidence et à tourner des 2 côtés ^^ le plus dur c’est le démarrage, j’y arrive pas encore sans support!
Ah ah ah, je suis tristesse, il m’eut suffit de passer en BLDC …
Faut caler le pied arrière et mettre le pied avant dès que la stabilité est là !
Entraînes toi en légère descente, sans moteur : une ou deux petites impulsions du pied avant, et tu cales ton pied.
Ça aide aussi pas mal au début de ne pas mettre les straps (juste pour s’entrainer au départ).
Haha c’est trop tentant mais je te l’avais dit 

J’étais ancré dans l’idée qu’en BLDC, il y avait obligatoirement des problèmes pour les départs arrêtés …
FAULT_CODE_DRV ?
oui c’est ça
Je suis tristesse … Ça n’aura pas pris 400km :’(
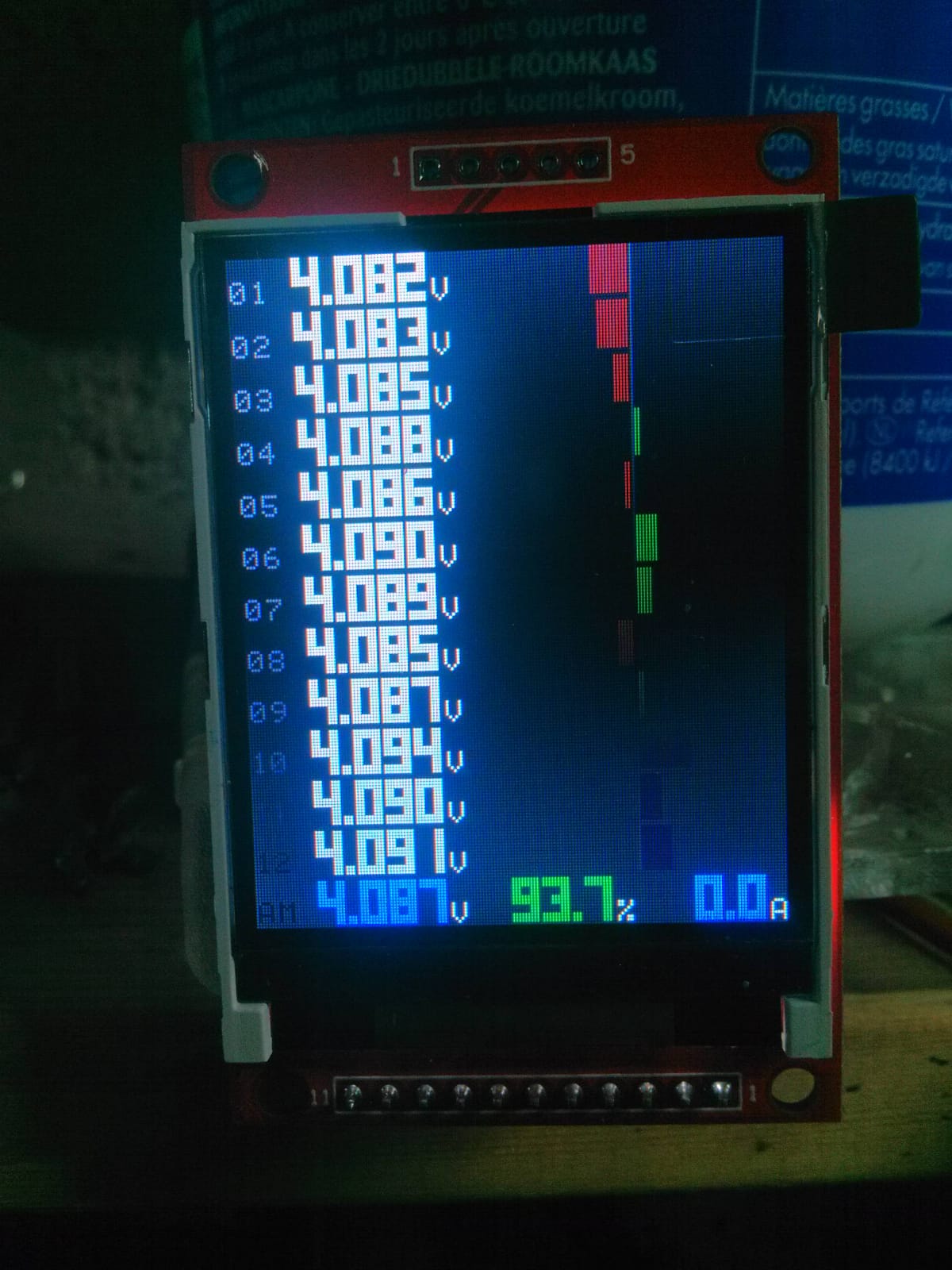
J’ai avancé dans le montage des machins : j’ai installé un voltmètre, le BMS (pour rappel : Smart BMS LLT 60A) et j’ai configuré un arduino (un STM32 pour être précis) avec un écran pour afficher l’équilibrage des cellules.
Cela m’a permis de voir qu’une des cellules était pas mal déséquilibrée (3,8V alors que les autres étaient à 4,1V) ; j’ai passé toute la journée d’hier à la charger individuellement à 1A !
Sur la photo, elle est dans les clous, à voir si c’est la cellule qui est défectueuse ou si c’était juste un problème d’équilibrage.
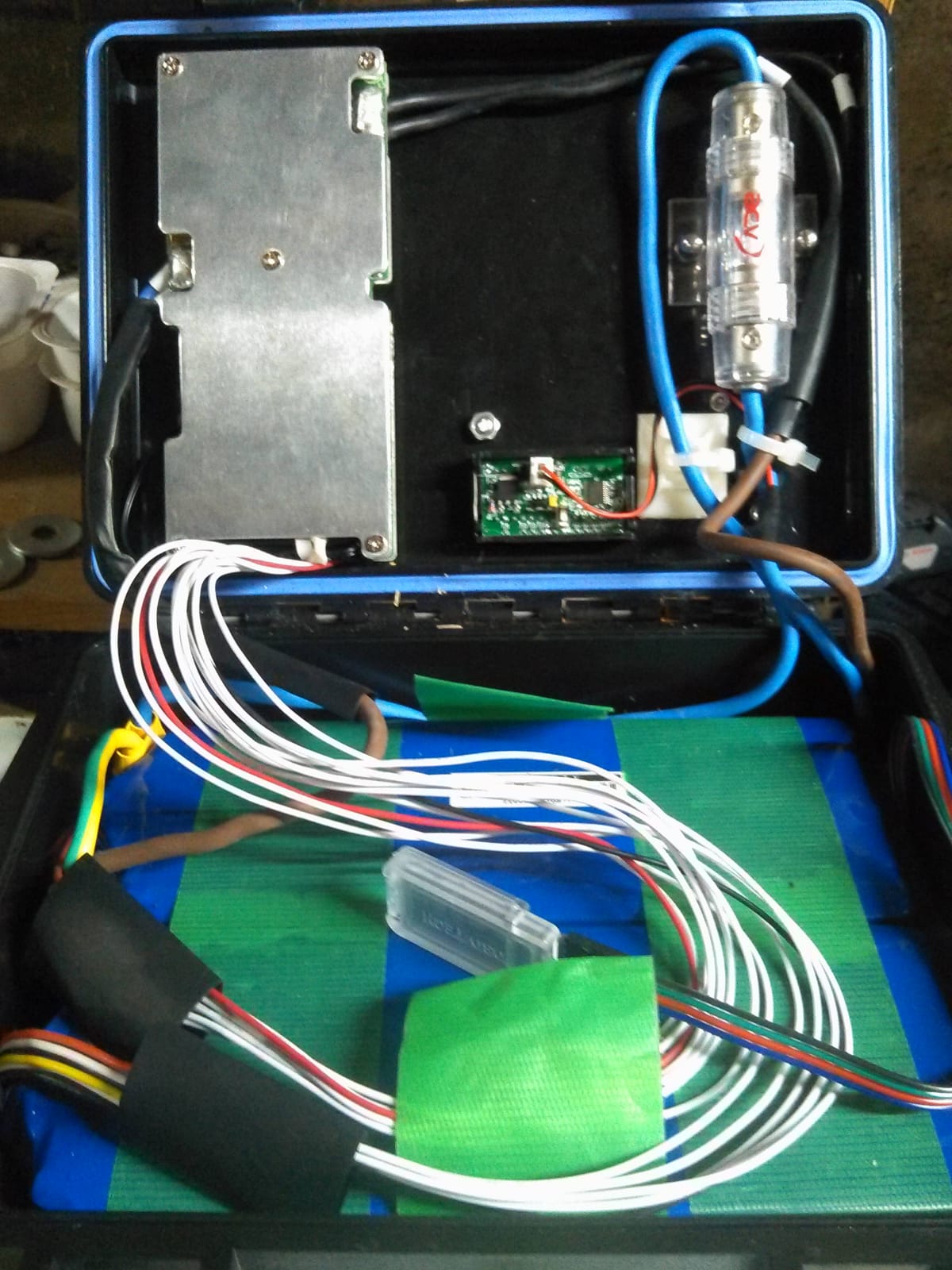
L’extérieur de la boîte avec la loop-key et le voltmètre.
L’intérieur, avec le BMS, le fusible, le dessous du voltmètre, la place pour mettre l’écran de contrôle du BMS et le module BT pour le VESC.
A ce propos : est ce normal que je n’arrive pas à afficher les données du VESC dans l’appli Ackmaniac ?
Alors que le partage de connexion TCP/IP via l’appli Ackmaniac fonctionne, et que j’arrive à me connecter en direct depuis l’ordi sur le VESC en BT.
Est ce une question de version du firmware ?
Je me répond pour la postérité :
En passant sur le firmware Ackmaniac 3.102, l’appli se connecte correctement !
Joli! C’est bien plus propre!
J’ai trouvé une solution à peu près satisfaisante pour l’écran : comme j’ai un chargeur avec une prise XLR 3, et qu’il n’y a que 2 broches d’utiles (1 et 2, respectivement +50,4V et 0V), j’ai utilisé la broche 3 pour faire passer un +5V (et j’en ai profité pour raccorder à la terre le chassis pendant la charge).
Au passage : j’ai pris ce chargeur YZPower 50,4V 8A, en demandant spécifiquement une prise XLR3 et une prise Schuko ; et j’ai été assez décu de m’apercevoir que les câbles des deux côtés sont des 2 conducteurs, donc aucune terre …
Qu’à cela ne tienne, j’ai remplacé les câbles par un 3 conducteurs côté secteur et 4 conducteurs (+50,4V, 0V, +5V, Terre) côté CC.