Bonjour et d’avance merci à ceux qui pourraient m’aider.
CE QUE J’AI :
De chez Flipsky j’’ai un remote VX2 pro et un contrôleur simple FSESC6.6
J’utilise soit la version 2.02 avec firmware 4.1 soit version 1.26 avec firmware 3.63 avec toujours les mêmes problèmes.
J’ai acheté 4 moteurs différents à tester qui sont des hub motor diamètre 70mm avec hollow shaft (carré de 12 puis alésage ø8.1) pour skateboard chez Aliexpress. Je garderai celui qui me semblera le plus adapté. Ils sont donnés pour du 24/36V avec des intensités de pointe allant de 12 à 22A et KV de 58 à 90.
J’ai 3 moteurs qui seraient en 14 pôles et un qui serait en 20 pôles (C’est avec ces entrées que la vitesse affichée sur le remote est bonne)
J’ai bien bridé l’axe du moteur dans un étau et je n’ai pratiquement pas de jeu angulaire au carré d’entrainement.
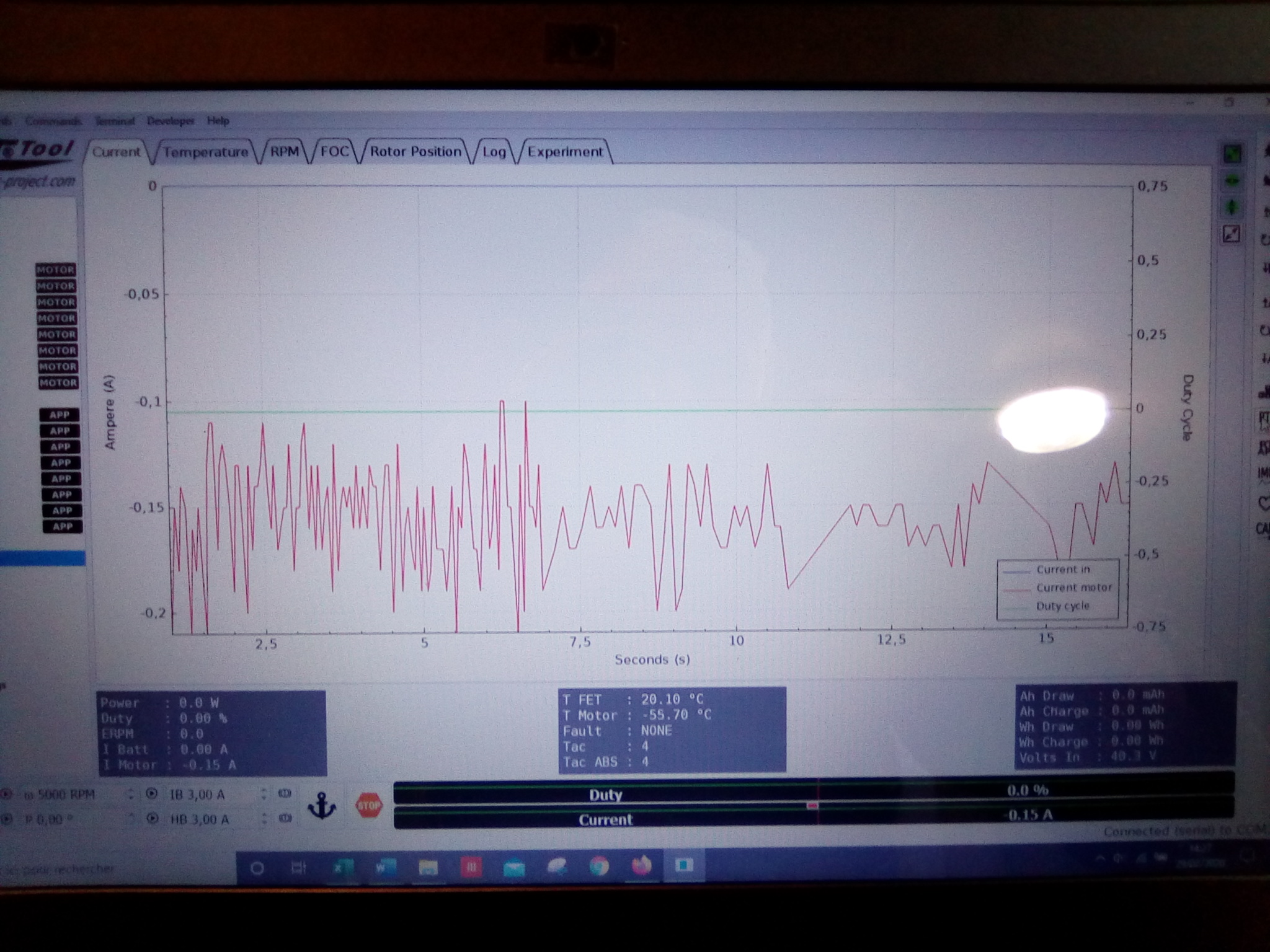
Je travaille en 10S 4P li-ion avec courant max in et moteur à 6A. J’ai essayé avec 10A, ça ne change rien.
Je n’ai jamais eu de défaut affiché entrainant l’arrêt du contrôleur.
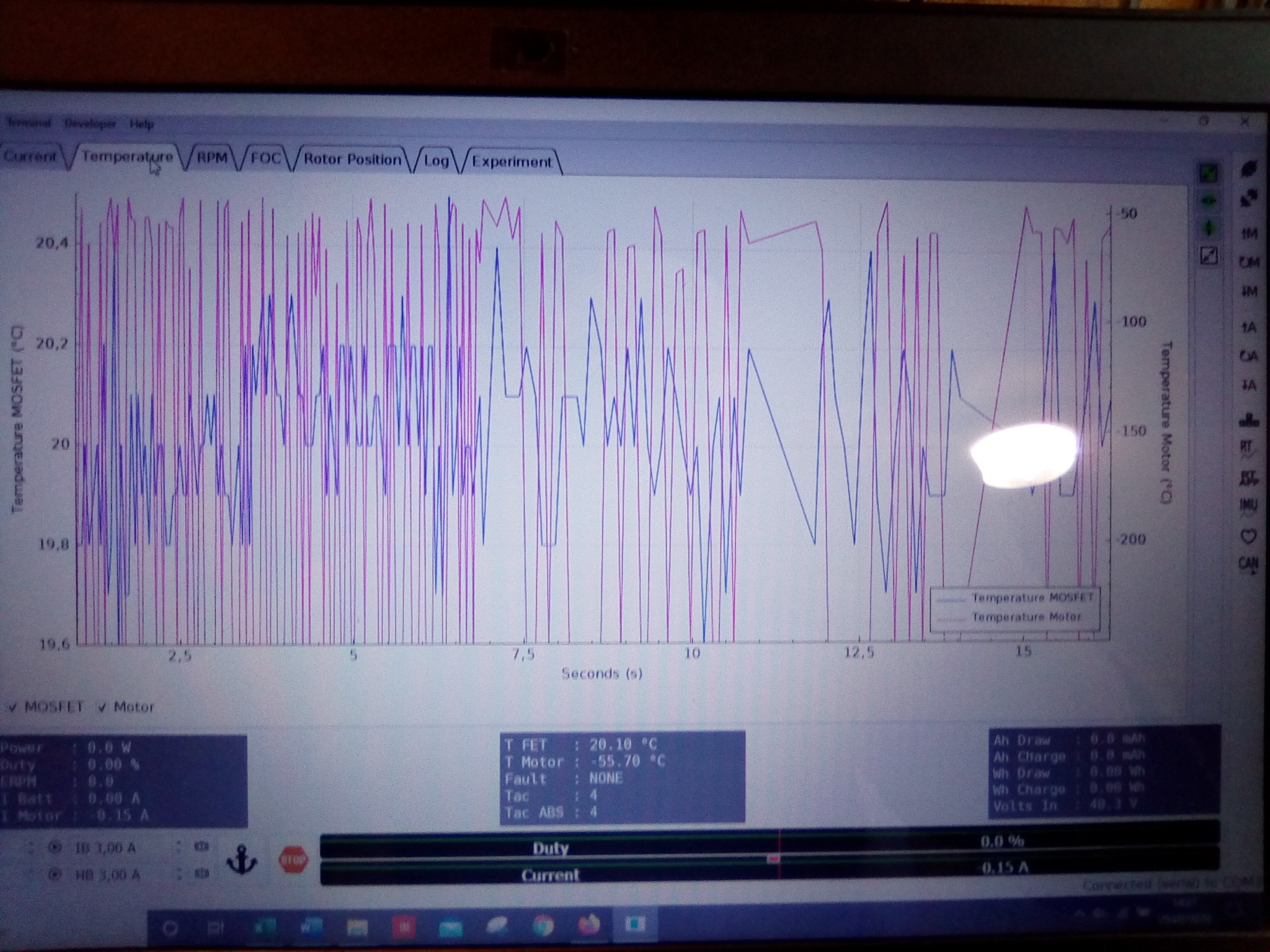
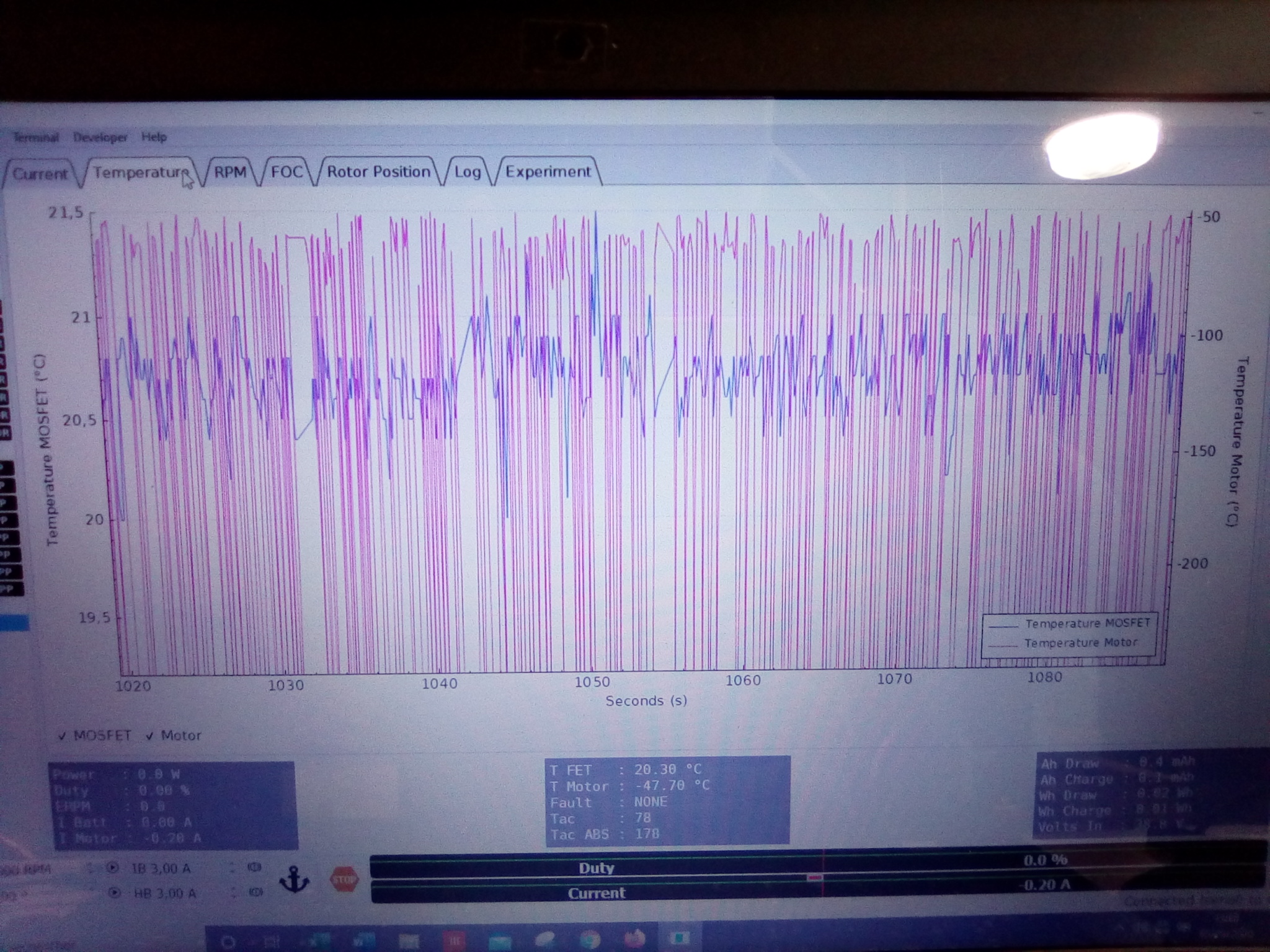
Les tests étant courts, la température contrôleur ne monte jamais plus de 6°.
Tous les moteurs sont avec hall sensor, mais sans sonde de température. Donc la borne de sonde de température n’est pas raccordée dans le contrôleur.
Je veux seulement avoir une petite assistance sur mon vélo pour franchir les cols et régénérer à la descente.
CE QUI MARCHE :
La télécommande VX2 pro flipsky. Pour info : il ne faut pas faire le wizard setup input qui nous envoie sur une entrée en ppm. L’entrée utilisée est UART. Simplement paramétrer VESC Remote. Petit défaut : parfois je ne peux pas sélectionner un des 3 modes de puissance en appuyant sur le setting button; il faut donner un petit coup d’accélérateur pour ça remarche. Autre défaut : dans « vesc remote » « control type » le « off » fait sa fonction, par contre qu’on sélectionne « current » ou « current no reverse »: on reste tjrs en current no reverse. Mais cela ne me dérange pas pour mon application.
CE QUI NE MARCHE PAS :
Pour résumer quand j’arrive à faire le wizard et que le moteur tourne il fait un bruit infernal, a du mal de démarrer. Une seule fois par hasard et uniquement avec le firmware 4.1 un des 4 moteurs a fonctionné silencieusement avec seulement du bruit dans la phase de démarrage. Aujourd’ hui si je fais le wizard à partir du welcome en sélectionnant un poids de moteur (j’ai entre 570g et753g) j’ai eu parfois erreur 11 et dans tous les cas il me dit sensorless alors qui j’ai des capteurs hall. J’ai bien 5v en alim des capteurs et quand je tourne le moteur chacun des 3 hall passe de 0 à 5V. Si je vais dans motor setting, je remplis bien toutes les données « général » et « additionnal info » puis je vais sur « foc » et là je mets bien sensored et lance la détection. Parfois il refuse la 1ère étape en disant « svp mesurer la résistance en 1er » parfois en bougeant les valeurs I, D, RPM il donne des valeurs complètement différentes suivant mes valeurs d’entrée. Et quand je lance la détection "hall sensor» il ne trouve pas, si je mets un peu plus de courant le moteur bouge d’un cran dans chaque sens et le test échoue car j’ai tjrs 0 dans toutes les cases. Il y a 3 jours la détection des tables de hall était OK et j’ai pu faire des essais malgré un bruit énorme du moteur. Maintenant plus rien ne marche, refus à tous les coups de détecter les capteurs hall. Et j’ai encore vérifié que mes 5 fils hall étaient bien connectés au contrôleur.
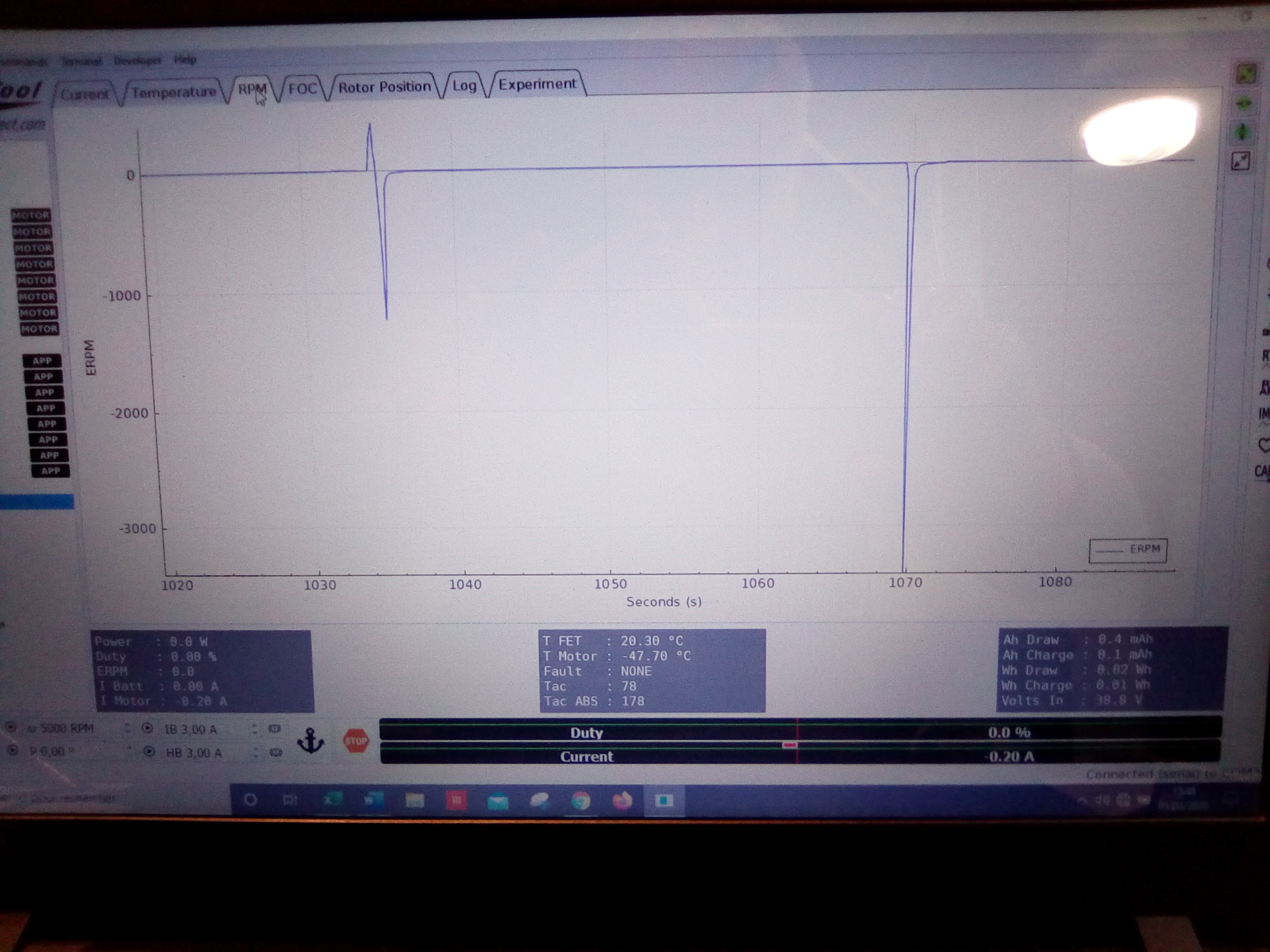
Je ne trouve pas la solution après environ 30h de test. Toute ma mécanique (débrayage du galet, mode moteur, mode régénération) fonctionne super bien, j’ai pu faire des tests le 1er jour en entrainant par friction le mandrin d’un petit tour et aussi faire des mesures intéressantes en régénération. Par contre toujours avec un bruit infernal et une mauvaise maitrise de la vitesse. Autre souci dès le 1er jour : si je mets dans « motor setting » « général » « rpm » « max erpm » en dessous de 100000, alors le moteur s’arrête brutalement au seuil erpm que j’ai fixé puis redémarre à fond pour retourner à ce seuil etc. Donc je pense que le moteur ne sait pas travailler en sensorless. De là dois-je conclure que les paramètres trouvés R, L, etc. sont farfelus ? Quand je teste un autre modèle de moteur j’ai toujours les mêmes problèmes. Pourquoi ça a un peu fonctionné le 1er jour et que maintenant je n’arrive même plus à faire tourner le moteur ?
Je suis complètement à bout d’idées. Si quelqu’un pouvait m’aider ? Est un problème parce que je fais une mauvaise manipulation ? de logiciel ? de contrôleur ? Je crois que la résistance d’un bobinage augmente de 5% par 10°C. Est-ce que le logiciel tient compte de la température du moteur pour faire varier le R ? Ou le fait que je n’ai pas de sonde de température dans le moteur et donc que la résistance calculée à la valeur constante affichée de -60°C diffère de la valeur réelle qui augmente quand le moteur chauffe ? J’ai donné ma contribution à Benjamin Vedder, est ce que je peux avoir de l’aide de cette organisation ? Ou contacter flipsky ? Si vous voulez d’autres infos sur mes problèmes, n’hésitez pas à me demander des détails. Je n’ai aucune capacité ni expérience dans la programmation pure, donc je ne sais pas comprendre ou écrire des lignes de programme.
 . Beau projet sinon, bon courage.
. Beau projet sinon, bon courage.