Yes, merci, t’inquiète tous est déjà monté, raccordé comme suis :
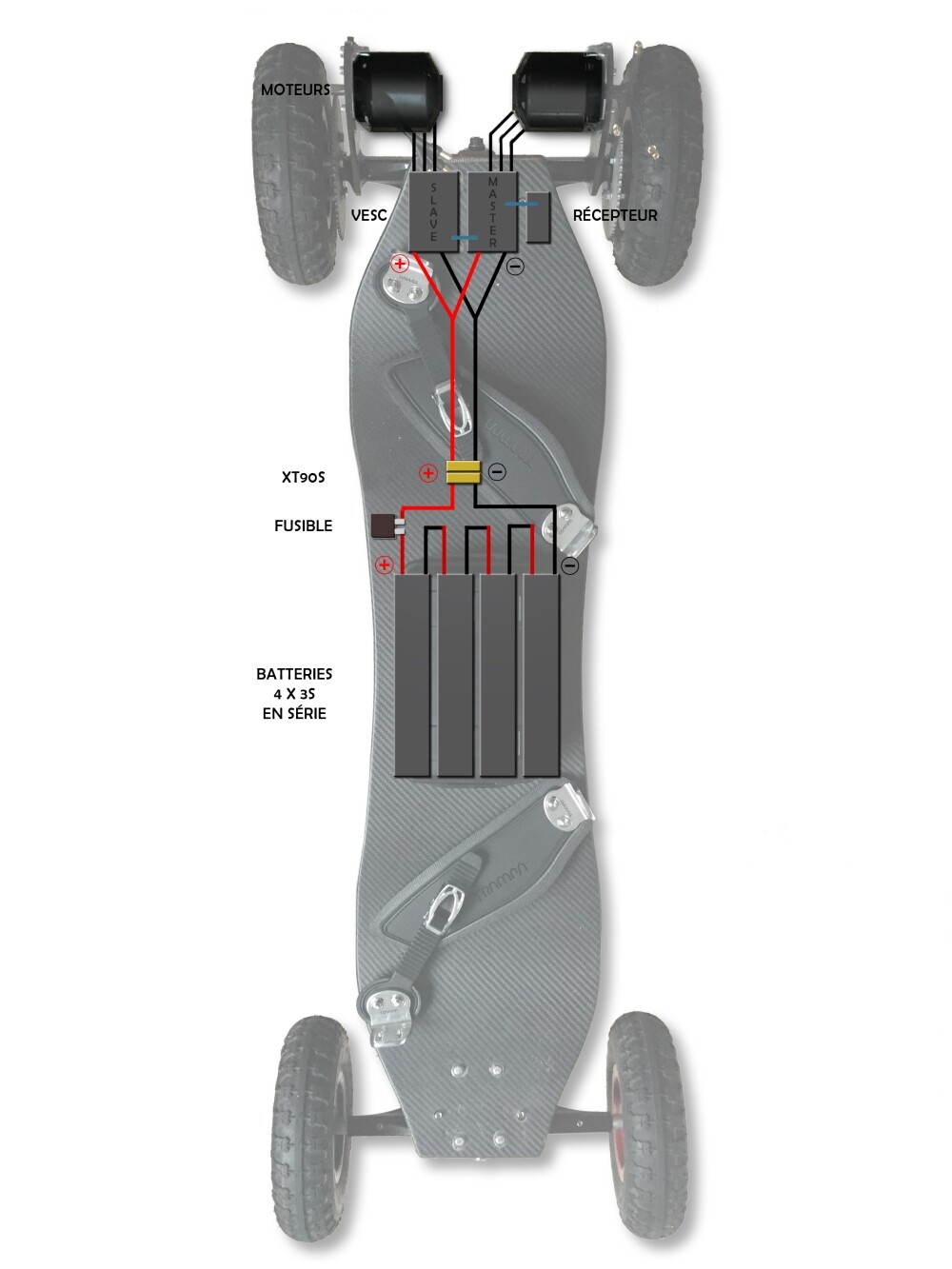
j’ai bien suivit tes pré-étapes de « »VESC : comment le câbler, l’installer et le programmer« » et bien rematé ton topic et ton build
Mais il n’y a rien de très précis ou détaillé sur
Donc je raccorde les 2 partie de câble en conservant seulement les deux du milieu ?!

c’est simplement ça ??
je voulais juste m’en assurer des 2 pins du milieu ![]()
Cool en tous cas je me lance alors !