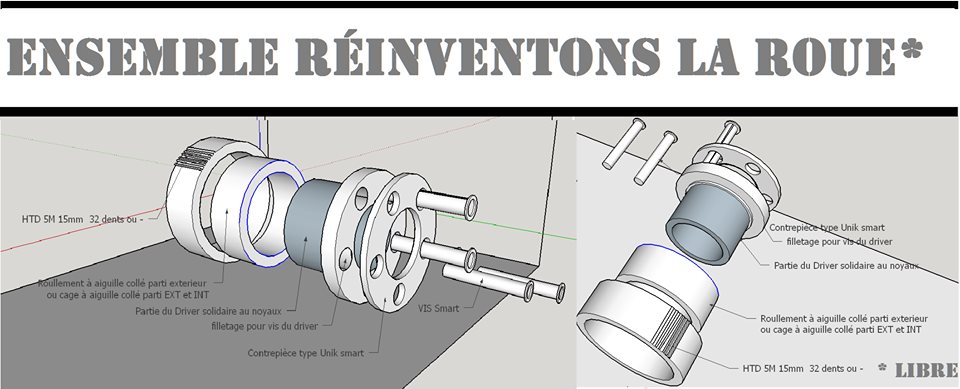
Salut à tous, cela fait un moment que j’en parle alors il est temps de se lancer ! Projet Driver 100% roue libre lancé. C’est à dire ni frein moteur, ni frein courroie, bref pas de frein du tout. Je suis à la recherche d’un ou plusieurs Builders partenaires pour ce projet, si jamais ça motive quelqu’un, ça me ferais super plaisir. L’usage final de ce genre de poulie n’est pas dédié uniquement au DH, elle peut permettre de transformer votre Eskate en SAE ( Skate a Assistance électrique ) "The best pushable Esk8 ! " vous voyez le genre ? Sinon pour ce qui est de l’absence de frein, il y a toujours la solution de frein par servo moteur qu’a développé Tireun. je reviens très vite sur ce post pour faire la synthèse de ce qui s’est dis sur FB et en tirer les premières conclusions.
Idée intéressante, l’idée est d’utiliser le même système roue libre (cassette) qu’en vélo ? De mémoire le fabricant Carvon (maintenant disparu) avait fait un système permettant d’entraîner deux roues à partir d’un seul moteur, je pense que c’était le même principe. Je me demande désormais si leur système pouvait freiner…
Bah faut juste changer l’axe moteur pour un plus long et avoir une poulie moteur des 2 cotés du moteur et c’est parti ! Quel rapport avec le frein donc ? @Cathode a fait ça aussi, sur ce forum, pas besoin d’être CarvON ![]()
D’après ce que je viens de voir du build de Cathode, il n’y a apparement pas de roue libre. Donc si c’est bien le cas, il y a un frein moteur + un frein courroie dans ce montage (sans parlé du probleme de differentiel qui fera un frottement de plus).
Ce que j’ai compris c’est que Benji souhaite aucun freinage d’où la nécessité d’un système de roue libre (comme sur les vélos…) sûrement identique au montage Carvon single motor dual drive : Voir ici
Ou Ici
Je n’arrive pas à retrouver la vidéo du fonctionnement…![]()
{kind=link}
{kind=link}
De mémoire y avait pas de roue libre sur les trucs de l’autre escroc 
Bon vu qu’on ma tag, me voila a lire le topic. Effectivement le One motor 2WD n’est selon moi pas l’avenir.
Bon alors, perso le proto CADa base de servo’ ou chépakoi bref j’ai absolument rien capter. Pour ce projet pourquoi ne pas prendre un sprocket avec anneau de freewheel comme il ce qui ce fait couramment en vélo, l’adapter coté roue de la board et donc passer en chaîne.
Je suis tomber sur des modèles avec pas de vis interne :

Ça me semble être un incroyable base pour commencer a bricoler quelque chose.
Tu as tout compris cathode et avec ce genre de système, plus de frein moteur ou courroie et plus de problème de diferenciel sur un setup 2wd1moror
Holala chui fatiguer moi… j’avoue que ce que je propose c’est exactement ce que tu voulais déjà faire en faite XD
Du coup un p’ti 80100 sans le drag d’une transmi’ fixe et le bénéfice d’un frein sur l’avant (le top question transfert de masse). Les rageux diront qu’on perd la regen, ils faut juste leur répondre que le gain est seulement de l’ordre de 5 a 10% question range donc certe appréciable mais pas vital.
Peut’etre même que le gain de plus avoir de « courant a vide » compense a lui seul le gain de la regen question range. Aprés tout le meilleur moyen d’économiser / d’optimiser une énergie ou autre, c’est de pas la dépenser.
Par contre il va falloir faire quelque chose sur la chaîne car il me semble qu’un homme avec entrainement qui donne tout ce qu’il a génère plus ou moins 500W, une chaine de vélo c’est rated plus ou moins 800W au démarrage selon si son angle de course n’est pas trop obtus sur le pignon qui l’entraîne de ce que j’ai pu lire sur les forum d’ebike. Avec deux transsmi’ ça double mais ca reste pas assez.
Ca existe des chaines de vélo « ultra heavy duty » ?
Edit : je pense a un truc. Il va quand même y avoir un problème de différentiel en faite. Dans le cas ou une roue tourne a l’inverse de l’autre ok tout baigne mais dans le cas ou une roue tourne moins vite que l’autre (ce qui sera la cas) la ça redevient d’la merde en faite. Donc dans ta session DH ou t’utilise pas le moteur ya pas de problème mais dés que tu utilise le moteur par contre …
J’ai rien compris a ton Edit mais pas de soucis de diferenciel dans la mesure ou le systeme est indépendant sur chacune des roues. En effet le moteur ne pourra pas entrainer une roue plus vite que l’autre (en théorie ) mais dans la pratique comme rien n’empêchera la roue d’aller plus vite que ne le permet le moteur, le problème ne se posera pas, enfin je pense.