Hello,
J’ai ressorti ma bamboo gen2 de son placard et je me suis mis en tête de la ressusciter ![]()
La batterie d’origine ne m’a jamais apporté satisfaction et c’était de mon point de vue un gros raté de cette board (coupures intempestives à l’accélération notamment).
Je suis donc parti sur une évolution avec un budget modéré :
- vesc flipsky v4.12 50A avec le moteur d’origine (je suis en config MTB 15/75 avec des roues de 190mm)
- batterie de mon vélo électrique que j’ai « sauvagement » fixé dessus (48v/11,5Ah et 30A en continu), c’est moche mais efficace

Après quelques tâtonnements sur les réglages, je suis arrivé à faire un truc qui roule… mais pas longtemps malheureusement ![]()
Je suis en FOC et après 2 ou 3 km, le skate perd de la puissance. Je ne sais pas si c’est le moteur qui sature ou si c’est le VESC qui chauffe… Pas de messages d’erreur dans les logs. Hier, le skate ne répondait même plus à la télécommande. Je suis arrivé à faire tourner un peu le moteur directement à partir de VESC tools, mais j’ai préféré ne pas empirer les choses et laisser tout cela refroidir…
La plupart de mes settings ont été faits par tatonnements vu que je n’ai pas pu trouvé les specs du moteur d’origine evolve 350W.
Celui-ci : https://evolveskateboards.fr/collections/bambou-generation-2-pieces-detachees/products/moteur-brushless-200-watt
Quelqu’un est-il déjà arrivé à le faire fonctionner avec un VESC v4.12 en 50A ?
Des exemples de config qui marchent ?
Merci par avance et @+,
Vincent.
Pour info, ma config actuelle :
<pwm_mode>1</pwm_mode>
<comm_mode>0</comm_mode>
<motor_type>2</motor_type>
<sensor_mode>0</sensor_mode>
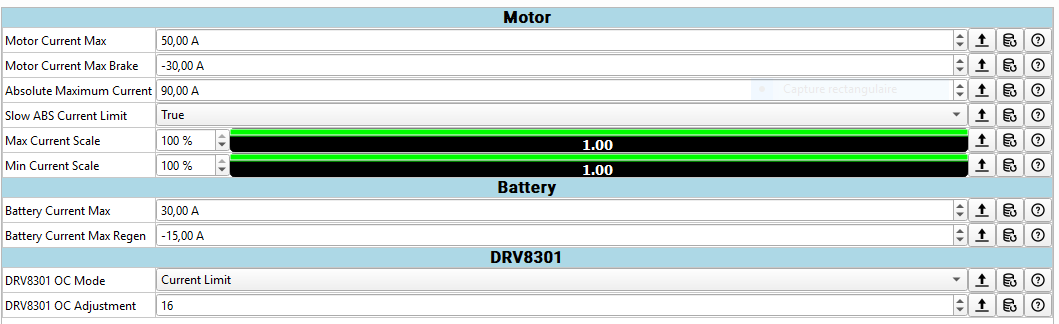
<l_current_max>50</l_current_max>
<l_current_min>-30</l_current_min>
<l_in_current_max>30</l_in_current_max>
<l_in_current_min>-15</l_in_current_min>
<l_abs_current_max>90</l_abs_current_max>
<l_min_erpm>-100000</l_min_erpm>
<l_max_erpm>100000</l_max_erpm>
<l_erpm_start>0.8</l_erpm_start>
<l_max_erpm_fbrake>300</l_max_erpm_fbrake>
<l_max_erpm_fbrake_cc>1500</l_max_erpm_fbrake_cc>
<l_min_vin>8</l_min_vin>
<l_max_vin>57</l_max_vin>
<l_battery_cut_start>40.8</l_battery_cut_start>
<l_battery_cut_end>37.2</l_battery_cut_end>
<l_slow_abs_current>1</l_slow_abs_current>
<l_temp_fet_start>85</l_temp_fet_start>
<l_temp_fet_end>100</l_temp_fet_end>
<l_temp_motor_start>85</l_temp_motor_start>
<l_temp_motor_end>100</l_temp_motor_end>
<l_temp_accel_dec>0.15</l_temp_accel_dec>
<l_min_duty>0.005</l_min_duty>
<l_max_duty>0.95</l_max_duty>
<l_watt_max>1.5e+06</l_watt_max>
<l_watt_min>-1.5e+06</l_watt_min>
<l_current_max_scale>1</l_current_max_scale>
<l_current_min_scale>1</l_current_min_scale>
<l_duty_start>1</l_duty_start>
<sl_min_erpm>150</sl_min_erpm>
<sl_min_erpm_cycle_int_limit>1100</sl_min_erpm_cycle_int_limit>
<sl_max_fullbreak_current_dir_change>10</sl_max_fullbreak_current_dir_change>
<sl_cycle_int_limit>227.69</sl_cycle_int_limit>
<sl_phase_advance_at_br>0.8</sl_phase_advance_at_br>
<sl_cycle_int_rpm_br>80000</sl_cycle_int_rpm_br>
<sl_bemf_coupling_k>197.81</sl_bemf_coupling_k>
<hall_table__0>-1</hall_table__0>
<hall_table__1>1</hall_table__1>
<hall_table__2>3</hall_table__2>
<hall_table__3>2</hall_table__3>
<hall_table__4>5</hall_table__4>
<hall_table__5>6</hall_table__5>
<hall_table__6>4</hall_table__6>
<hall_table__7>-1</hall_table__7>
<hall_sl_erpm>2000</hall_sl_erpm>
<foc_current_kp>0.036</foc_current_kp>
<foc_current_ki>54.73</foc_current_ki>
<foc_f_sw>25000</foc_f_sw>
<foc_dt_us>0.12</foc_dt_us>
<foc_encoder_inverted>0</foc_encoder_inverted>
<foc_encoder_offset>180</foc_encoder_offset>
<foc_encoder_ratio>7</foc_encoder_ratio>
<foc_encoder_sin_gain>1</foc_encoder_sin_gain>
<foc_encoder_cos_gain>1</foc_encoder_cos_gain>
<foc_encoder_sin_offset>1.65</foc_encoder_sin_offset>
<foc_encoder_cos_offset>1.65</foc_encoder_cos_offset>
<foc_encoder_sincos_filter_constant>0.5</foc_encoder_sincos_filter_constant>
<foc_sensor_mode>0</foc_sensor_mode>
<foc_pll_kp>2000</foc_pll_kp>
<foc_pll_ki>30000</foc_pll_ki>
<foc_motor_l>3.6e-05</foc_motor_l>
<foc_motor_r>0.0547</foc_motor_r>
<foc_motor_flux_linkage>0.008393</foc_motor_flux_linkage>
<foc_observer_gain>1.42e+07</foc_observer_gain>
<foc_observer_gain_slow>0.05</foc_observer_gain_slow>
<foc_duty_dowmramp_kp>10</foc_duty_dowmramp_kp>
<foc_duty_dowmramp_ki>200</foc_duty_dowmramp_ki>
<foc_openloop_rpm>400</foc_openloop_rpm>
<foc_sl_openloop_hyst>0.1</foc_sl_openloop_hyst>
<foc_sl_openloop_time>0.1</foc_sl_openloop_time>
<foc_sl_d_current_duty>0</foc_sl_d_current_duty>
<foc_sl_d_current_factor>0</foc_sl_d_current_factor>
<foc_hall_table__0>255</foc_hall_table__0>
<foc_hall_table__1>255</foc_hall_table__1>
<foc_hall_table__2>255</foc_hall_table__2>
<foc_hall_table__3>255</foc_hall_table__3>
<foc_hall_table__4>255</foc_hall_table__4>
<foc_hall_table__5>255</foc_hall_table__5>
<foc_hall_table__6>255</foc_hall_table__6>
<foc_hall_table__7>255</foc_hall_table__7>
<foc_sl_erpm>2500</foc_sl_erpm>
<foc_sample_v0_v7>0</foc_sample_v0_v7>
<foc_sample_high_current>0</foc_sample_high_current>
<foc_sat_comp>0.15</foc_sat_comp>
<foc_temp_comp>0</foc_temp_comp>
<foc_temp_comp_base_temp>25</foc_temp_comp_base_temp>
<foc_current_filter_const>0.1</foc_current_filter_const>
<foc_cc_decoupling>2</foc_cc_decoupling>
<foc_observer_type>0</foc_observer_type>
<foc_hfi_voltage_start>20</foc_hfi_voltage_start>
<foc_hfi_voltage_run>4</foc_hfi_voltage_run>
<foc_hfi_voltage_max>10</foc_hfi_voltage_max>
<foc_sl_erpm_hfi>2000</foc_sl_erpm_hfi>
<foc_hfi_start_samples>65</foc_hfi_start_samples>
<foc_hfi_obs_ovr_sec>0.001</foc_hfi_obs_ovr_sec>
<foc_hfi_samples>2</foc_hfi_samples>
<gpd_buffer_notify_left>200</gpd_buffer_notify_left>
<gpd_buffer_interpol>0</gpd_buffer_interpol>
<gpd_current_filter_const>0.1</gpd_current_filter_const>
<gpd_current_kp>0.03</gpd_current_kp>
<gpd_current_ki>50</gpd_current_ki>
<s_pid_kp>0.004</s_pid_kp>
<s_pid_ki>0.004</s_pid_ki>
<s_pid_kd>0.0001</s_pid_kd>
<s_pid_kd_filter>0.2</s_pid_kd_filter>
<s_pid_min_erpm>900</s_pid_min_erpm>
<s_pid_allow_braking>1</s_pid_allow_braking>
<p_pid_kp>0.03</p_pid_kp>
<p_pid_ki>0</p_pid_ki>
<p_pid_kd>0.0004</p_pid_kd>
<p_pid_kd_filter>0.2</p_pid_kd_filter>
<p_pid_ang_div>1</p_pid_ang_div>
<cc_startup_boost_duty>0.01</cc_startup_boost_duty>
<cc_min_current>0.05</cc_min_current>
<cc_gain>0.0046</cc_gain>
<cc_ramp_step_max>0.04</cc_ramp_step_max>
<m_fault_stop_time_ms>500</m_fault_stop_time_ms>
<m_duty_ramp_step>0.02</m_duty_ramp_step>
<m_current_backoff_gain>0.5</m_current_backoff_gain>
<m_encoder_counts>8192</m_encoder_counts>
<m_sensor_port_mode>0</m_sensor_port_mode>
<m_invert_direction>0</m_invert_direction>
<m_drv8301_oc_mode>0</m_drv8301_oc_mode>
<m_drv8301_oc_adj>16</m_drv8301_oc_adj>
<m_bldc_f_sw_min>3000</m_bldc_f_sw_min>
<m_bldc_f_sw_max>35000</m_bldc_f_sw_max>
<m_dc_f_sw>25000</m_dc_f_sw>
<m_ntc_motor_beta>3380</m_ntc_motor_beta>
<m_out_aux_mode>0</m_out_aux_mode>
<m_motor_temp_sens_type>0</m_motor_temp_sens_type>
<m_ptc_motor_coeff>0.61</m_ptc_motor_coeff>
<si_motor_poles>14</si_motor_poles>
<si_gear_ratio>5</si_gear_ratio>
<si_wheel_diameter>0.19</si_wheel_diameter>
<si_battery_type>0</si_battery_type>
<si_battery_cells>12</si_battery_cells>
<si_battery_ah>11.6</si_battery_ah>
<motor_brand>Unnamed</motor_brand>
<motor_model>Not Specified</motor_model>
<motor_weight>0</motor_weight>
<motor_poles>14</motor_poles>
<motor_sensor_type>0</motor_sensor_type>
<motor_description></motor_description>
<motor_loss_torque>0.03</motor_loss_torque>
<motor_quality_bearings>0</motor_quality_bearings>
<motor_quality_magnets>0</motor_quality_magnets>
<motor_quality_construction>0</motor_quality_construction>
<motor_quality_description></motor_quality_description>



 )
)