Mhz
Avril 24, 2017, 11:19
1
Salut à tous,
Merci pour ce forum, il est rempli d’infos intéressantes.
J’ai commencé un build. L’objectif étant de me fabriquer un skate pour faire une partie du trajet pour le boulot. Et pourquoi pas profiter des quais lyonnais cet été
Pas grand chose à dire pour le moment, à part que je me suis trompé dans la taille des trucks. Ils sont trop petits. Le problème c’est que j’ai déjà fait la découpe pour passer le kit UNIK CORE :lol:
La liste:
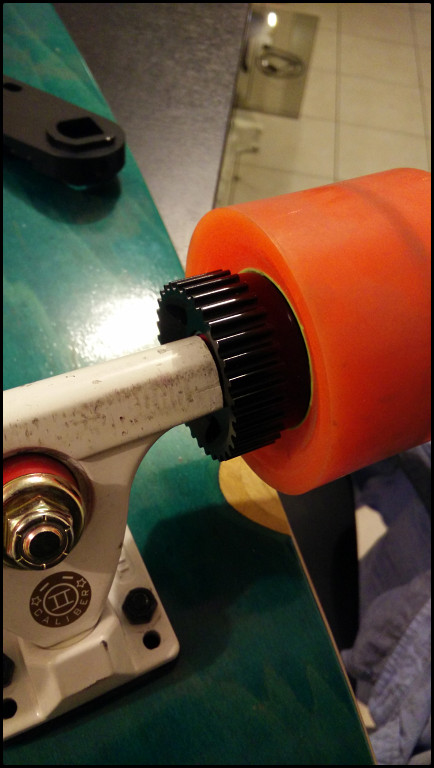
Roues orangatang kegel
Trucks caliber II 50°
Deck no name sans aucun flex
Alien 6355 HEV Outrunner brushless motor 190KV 2400W HTD-5 motor pulley – Bore size: 10mm, Number of teeth: 15T, Width: 15mm
Alien Power System 2.4Ghz Electric
Kit de montage UNIK CORE
VESC – Maytech
Lipo 5xTurningy 5000mah 2S
Lokean
Avril 24, 2017, 11:31
2
Et surtout montés à l’envers, comme les roues d’ailleurs !
Prends bien le temps de bien réfléchir ton build.
Mhz
Avril 24, 2017, 2:04
4
Je suis assez novice dans le monde du skate. Ça se voit d’ailleurs au semblant de montage que j’avais fait pour ces photos.
Tout est à l’envers mais je n’avais rien d’autre sous la main. :lol:
J’ai déjà quasiment toutes les pièces mis à part la batterie. Je mettrai à jour le premier post.
okp
Avril 24, 2017, 2:35
5
welcome ! prends bien ton temps pour ton build.
et surtout pour la config/ branchement du vesc, prends le temps de lire les tutos voire le topic entier [emoji14]
Riako
Avril 24, 2017, 6:38
7
Yes, cool deck je trouve aussi ! Tu peux pê rester avec ces trucks si tu pars en single (j’ai la même taille sur mon e-Cruiser), c’est juste que ça va carver un max !!
Mhz
Avril 24, 2017, 8:27
8
Je veux bien vos avis sur mes trucks. Je crois qu’ils sont trop petits:
Et voici le reste du matériel:
Il me manque encore quelques connecteurs (XT90 entre autre) mais surtout la batterie.
Edit: en fait la vrai question c’est plutôt, comment mesure t on le trucks? C’est la longueur totale?
Leon
Avril 25, 2017, 7:52
9
Yes un lyonnais de + !
Je présume que tu as acheté le VESC chez APS avec le reste de ta commande.
Lokean
Avril 25, 2017, 8:55
11
Ce sont des trucks 150 ou 180mm ?
Mhz
Mai 18, 2017, 8:43
12
J’avais commandé des trucks de 9 pouces… ils étaient trop court.
Donc j’ai recommandé chez UNIK des trucks qui vont bien, et 5 Lipo 5000mah 2S chez HobbyKing.
Le montage s’est terminée hier et la board fonctionne. Je suis vraiment amoureux de cette petite bête. J’en ai fait 40 min ce soir.
(je sais j’ai encore monté une roue à l’envers) :shock:
j’ai vraiment bien fait de commencer ce build :mrgreen:
je n’ai pas encore mis la gâchette à fond, je me suis fait un peu peur passé 20km/h :oops:
ça monte et descend les petites cotes dans mon quartier sans problème
vmax au GPS du téléphone (donc sans être appuyé à fond): 24km/h
Mais il me reste quand même du travail:
fabriquer le carter de protection pour les batteries
améliorer mon ride
régler quelques problèmes
J’ai quelques questions:
Je ne comprends pas pourquoi au branchement de mon XT90 j’ai une étincelle. Le XT90 est placé comme un interrupteur entre le + des batteries et le + du VESC. Est ce que j’ai fait une connerie?
Le moteur galère un peu pour démarrer, il faut y aller tout doux pour le démarrage. C’est normal non? c’est parce que j’ai un moteur uncensored?
Je précise que j’ai quand même fait le paramétrage du VESC en suivant la doc Maytech ^^
Merci pour votre aide
J’ai l’impression que tu as pris un xt90 au lieu d’un xt90s. le xt90 tout court n’empeche pas l’etincelle!
Sent from my SM-G930F using Tapatalk
Leon
Mai 18, 2017, 11:25
14
Hé ! tu n’es pas mort !!! tu sais que tu n’es pas seul sur Lyon ? je t’avais envoyé un message sur ta présentation puis ensuite long silence radio…
Pour l’étincelle c’est normal si tu n’utilises pas de XT90S ! donc attention tu risques de griller qqc (surement le VESC !)
Pour le moteur ça veut dire quoi galère ? il cogne ? Si oui, mauvais paramétrage du VESC.
Rejoins nous sur le Slack ou sur facebook si tu ne veux pas rider seul
Super !
Mhz
Mai 20, 2017, 2:08
16
Donc effectivement je me suis trompé c’est un xt90 et pas un xt90s
Je vais regarder des tutos pour mieux régler le VESC. Pourtant je pense pas m’être trompé (lecture du moteur, report des paramètres, puis sauvegarde)
C’est quoi les noms des communautés sur facebook et slack? J’aimerai bien vous rencontrer, faire des ballades et discuter esk8
Sauvegardes tes paramètres au format xml et colle le contenu du fichier ici (entre balise quote).https://www.facebook.com/groups/1014853468553477
Mhz
Mai 20, 2017, 3:48
18
Merci à tous pour votre aide http://www.w3.org/TR/REC-html40/strict.dtd ">
p, li { white-space: pre-wrap; }
Configuration loaded from the motor controller.
Merci à tous pour votre aide http://www.w3.org/TR/REC-html40/strict.dtd ">
p, li { white-space: pre-wrap; }
Configuration loaded from the motor controller.
Mhz
Mai 20, 2017, 6:03
20
Merci Pimousse !!!
Je vais tester ça.
Effectivement j’étais au courant pour le bug RAMP et j’y fais attention.



 ).
).