Bon, j’ai parcouru la doc de Flipsky, en long en large et en travers et … Je n’ai rien trouvé à ce sujet. J’ai trouvé quelques mises en garde, dont certaines que je ne comprend pas (comme de ne pas utiliser un câble en Y pour le PPM mais le CAN Bus, sous peine de cramer le controleur … Je trouve ça étrange).
Je me suis donc dit que c’etait peut être un problème sur d’anciennes versions de contrôleurs … J’y suis allé quand même.
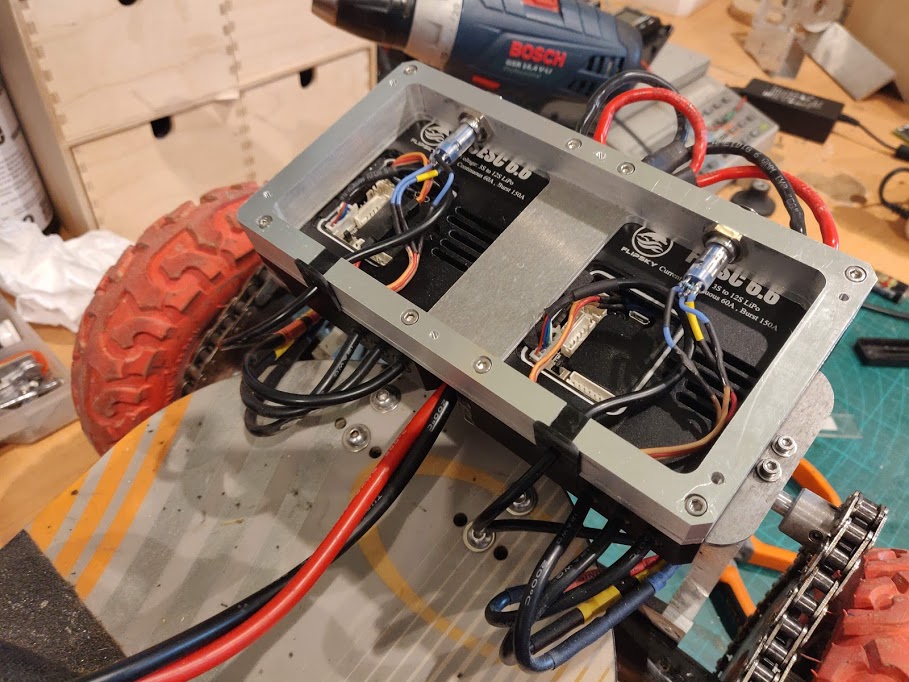
J’ai branché toutes les ficelles, puis les batteries et enfin mis sous tension les contrôleurs …
J’ai connecté mon PC préféré et lancé Vesc tool … Tout s’est passé assez bien. La version du logiciel est plus récente que celle du tuto, j’ai donc du adapter ce que je faisait. En particulier au niveau du master / slave. Ça se passe pas comme sur le tuto, il y a une auto-détection. Plus besoin de choisir pour chacun qui il est. En revanche quand j’accélérais, seul le moteur du master tournais. J’ai du mettre à True un paramètre du slave, qui, si j’ai bien compris sert à dire au slave qu’il doit se signaler au master. Je crois que Pimousse en parlais dans sa vidéo mais dans la dernière version, je ne l’avais pas dans l’assistant (ou je suis passé à coté).
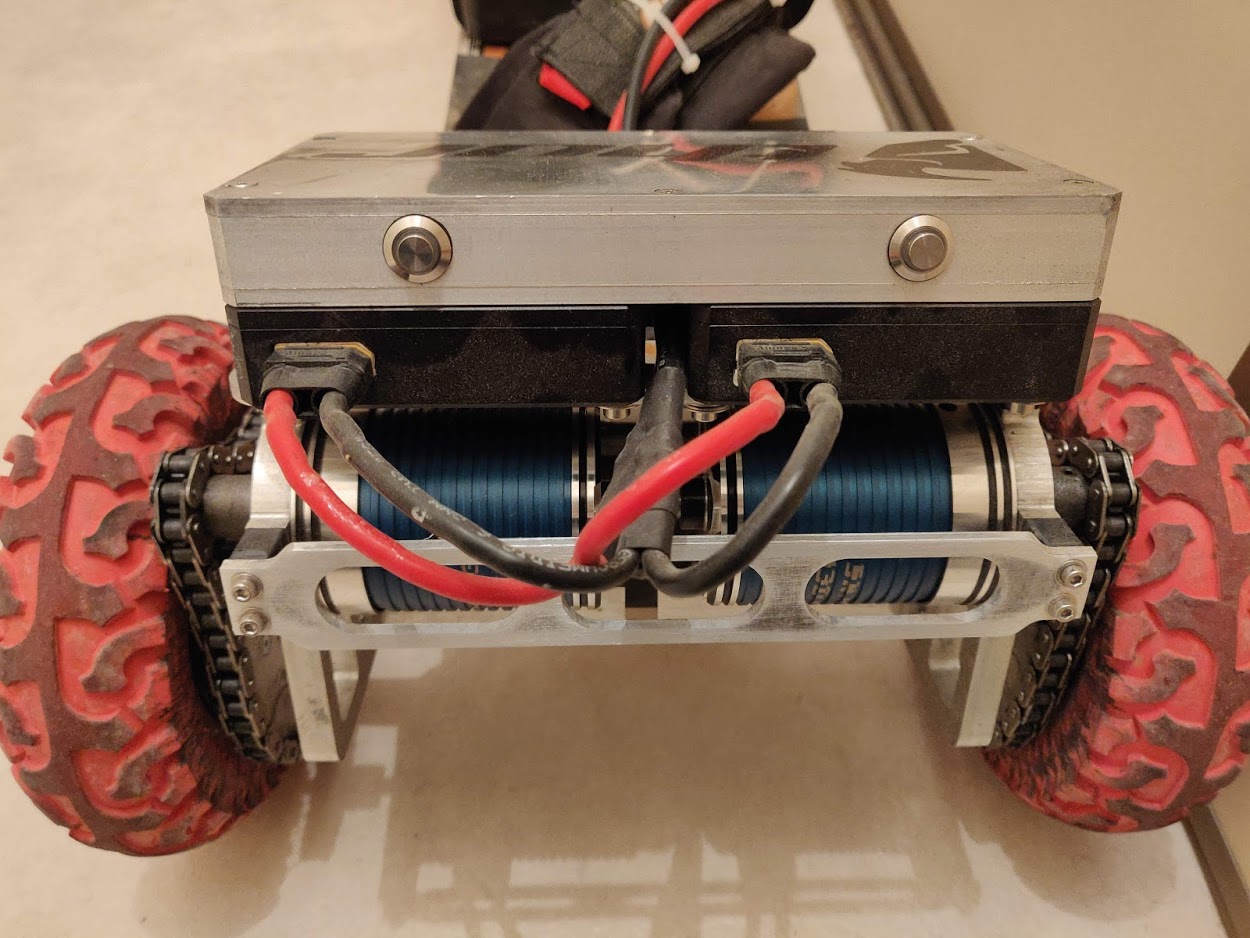
Résultat, pour le moment ça fonctionne bien. Les moteurs tournent et freinent.
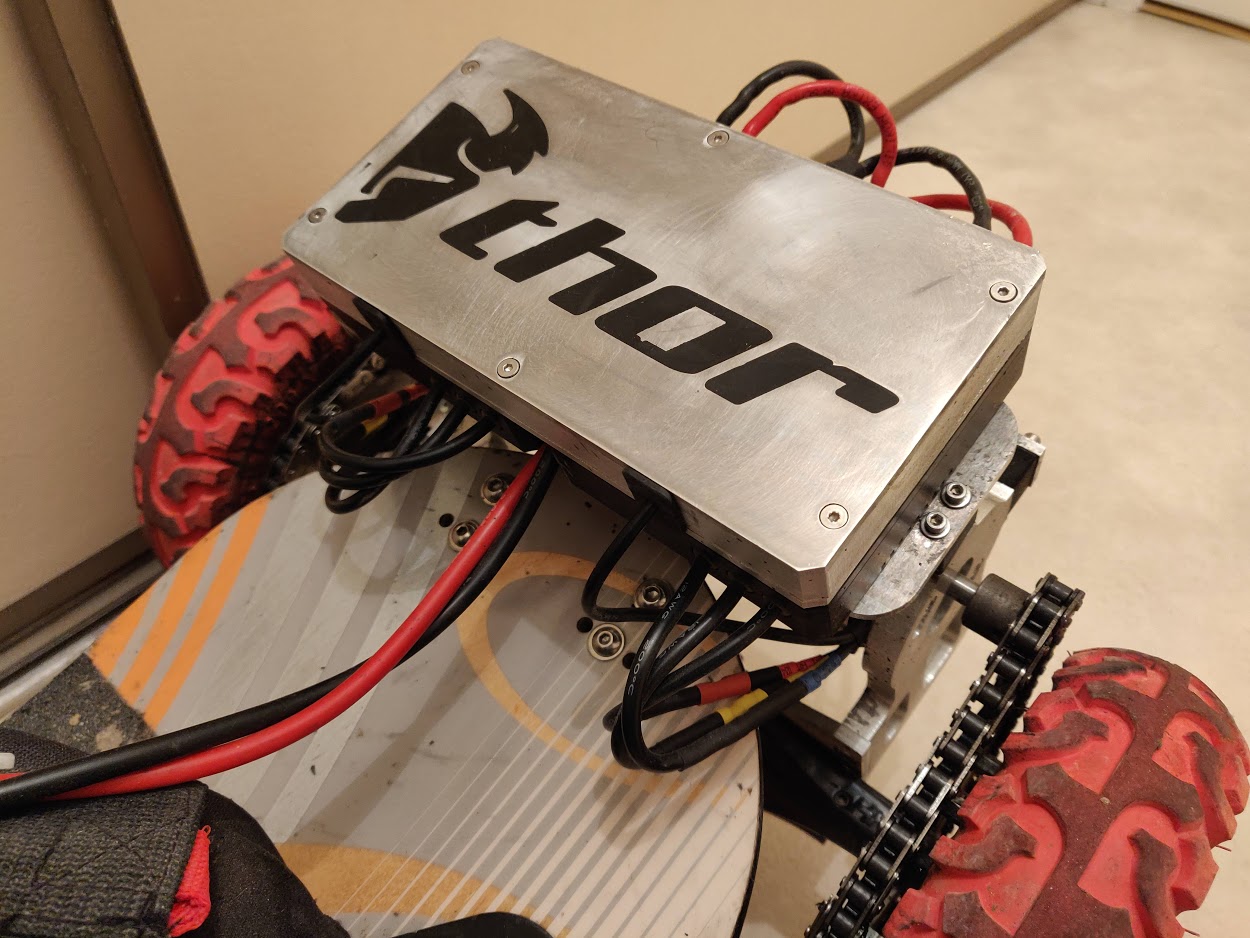
Tout est posé à blanc pour le moment …