Ce que je sais sur la réglementation en France pour les vélos à assistance électrique :
Quand on arrête de pédaler l’assistance électrique doit se couper automatiquement, l’assistance doit se couper au-delà de 25km/h et la puissance (électrique ou mécanique ?) ne doit pas dépasser 250W. La coupure automatique de l’assistance doit se réaliser en 2m maxi, soit à 25km/h en 288ms.
Je me suis renseigné auprès d’un fournisseur qui livre une roue électrique avant pour vélo qui se contrôle directement à partir d’un smartphone. Et qui joint un certificat de conformité à la norme Européenne. Il n’y a pas de capteur de pédalage ni de fin de course sur les freins, ni d’accélérateur. Il m’informe que « l’assistance se coupe quand vous ne donnez plus d’impulsion vers l’avant ». Et que « la régénération d’énergie fonctionne avec le capteur de pente et uniquement en descente ». C’est un moteur en direct drive.
Je sais qu’il y a un accéléromètre dans le projet VESC. Et que nos vélos ont des freins capables de décélérer pratiquement aussi bien que sur une voiture. Donc si je freine l’accéléromètre doit bien détecter une décélération pour couper le moteur.
Est-il possible de couper le moteur électrique sans rampe dès qu’on détecte une décélération ajustable. Enclencher la régénération automatiquement quand la décélération (qui est aussi proportionnelle au sinus de l’angle de pente en vitesse stabilisée). Et pourquoi pas en montée enclencher automatiquement l’assistance.
Pour le moment je vais fixer le remote Flipsky VX2 pro sur mon guidon. Quand je monte un col j’actionnerai la molette dans le sens moteur puis je passerai en cruise mode en appuyant en même temps sur le power button. Si je veux m’arrêter il faut que je touche n’importe quel bouton pour que cela coupe le cruise mode. En descente je vais regarder s’il existe aussi la fonction cruise mode quand je suis en régénération.
En plus de ma commande par le VX2 je voudrais par la suite utiliser l’accéléromètre du contrôleur et fixer 3 seuils de gamma. Le premier filtré pour enclencher l’assistance, le deuxième pour couper l’assistance sans délai, le troisième filtré pour enclencher la régénération. Je vois bien ces 3 cases ajoutée dans « app setting » « vesc remote » « général » et réglée par défaut pour ceux qui n’en ont pas besoin à 9.81m/s² pour le 1er et à -9.81 pour les 2èmes et 3ème. Et, je n’y connais pas grand-chose, mais je pense aussi qu’il faudrait faire un étalonnage des 3 axes en mettant le vélo horizontal en statique puis en le faisant avancer et reculer. Car le contrôleur peut être monté dans n’importe quelle position.
Question : Y a-t-il possibilité de paramétrer cela dans VESC tool ? Ou quelqu’un connait ‘il un programmeur à qui je pourrais passer une commande pour écrire ce programme ?
Tout cela me semble hasardeux.
Confier le pilotage du moteur par une simple décélération/Accélération me parait très peu robuste.
Quid de descendre un petit trottoir, taper un caillou, etc.
Ma question : pourquoi ne pas vouloir tirer de fils justement depuis le capteur de pédalier et un capteur de frein pour que tout cela soit bien plus robuste ?
Dans tous les cas, cela demande de la programmation sur le VESC car ce n’est pas pris en charge actuellement.
Surtout que sur un vélo il y a plein de « câbles » qui courent : freins, dérailleur … C’est pas en mettre quelques un de plus qui va dénaturer le véhicule !
Merci beaucoup de votre réponse. Comme vous le préconisez et que je suis incompétent dans l’écriture des programmes d’automatisme je vais faire du classique en attendant qu’un de mes collègues automaticien soit disponible. Pourtant aujourd’hui on a des imprimantes, alarmes, caméras etc. sans fils. Et depuis longtemps il y a des applications à base d’un programme qui s’appelait kinetics. Même les volets électriques n’ont plus d’alimentation de puissance.
Une personne de ma famille, qui a l’habitude de circuler en vélo électrique, a roulé avec ce produit sans fils. Elle me dit qu’il a trouvé le pilotage de l’assistance plus réactif que sur beaucoup de vélos électriques. Et que le vélo freinait normalement sans que le moteur pousse. Une vidéo d’un de ces produits : ELEBIKY F1 new - YouTube
Dès que le confinement sera terminé, je vais rouler en montagne pour valider la partie mécanique.
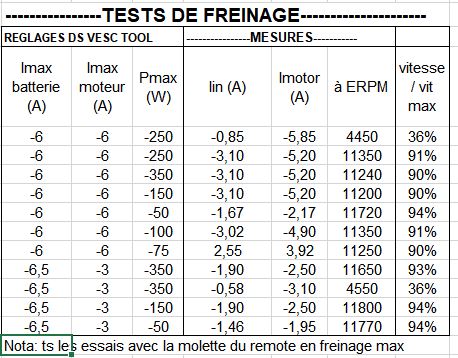
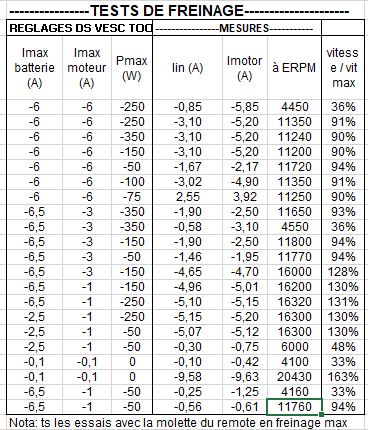
J’ai fait des tests de freinage sur un banc d’essai avec un type de moteur en jouant sur Imax batterie brake - Imax motor brake – wattage max brake. Ci-joint mes mesures actuelles. Je ferai semaine prochaine des essais en survitesse après équilibrage de mes moteurs. On voit qu’en basse vitesse on garde sensiblement la même intensité qu’en haute vitesse (donc le couple). Mais évidemment ce qui sort du moteur ne permet pratiquement pas de recharger la batterie. Donc le moteur chauffe plus qu’en haute vitesse. Pour cet été je vais rouler en bridant le freinage avec le Imax motor. Nota : je travaille en BLDC sensoless parce que le programme est incapable de faire le wizard en foc. En débranchant tout (capteurs hall, remote) le wizard arrive parfaitement à faire tourner le moteur silencieusement pendant le test foc, il dit que les valeurs sont bonnes, mais pour finir le test avec le sens de rotation ça broute….
Je comprends que le vesc tool est conçu pour avoir la meilleure sécurité pour des engins sans frein mécanique. Pourtant le marché des machines avec freins mécaniques est bien plus important (trottinette, vae, scooter, autos) Et dans ces applications on cherche transformer l’énergie de freinage en recharge batterie et jamais à freiner plus en générant des calories. Pourquoi il n’y a pas une case à cocher dans « motor setting » « wattage » qui serait « uniquement régénération » ? Au point de vue programme, je ne suis pas un spécialiste, mais je pense que ce n’est pas 50 lignes à écrire.
Les données entrées dans vesc tool pour le freinage à savoir puissance max et intensités moteur et batterie ne sont plus respectées dès que le moteur tourne plus vite que sa vitesse max (23km/h pour moi). Je pense dès que la tension délivrée par le moteur est supérieure à la tension batterie. Donc je ne dois surtout impérativement pas dépasser les 33km/h en descente, sinon je dépasse les 6.5A réinjectés dans la batterie.
Ma conclusion :
Je vais rouler cet été avec ce que j’ai. Mais je vais chercher un contrôleur qui fonctionne. Mes moteurs et le contrôleur flipsky ne sont pas en cause. C’est vesc tool qui a trop de bugs. Comment expliquer que pendant le test foc de wizard il monte en vitesse parfaitement dans un silence étonnant, puis fait parfaitement ses petits mouvements lents avant arrière pour détecter la position des halls sensors et refuse de tourner juste en fin de test pour définir le sens de rotation ? Et aussi les intensités et puissance max de freinage qu’on ajuste et qui ne sont pas respectées. Beaucoup de temps perdu avec un produit décevant.
Intéressant comme projet je réfléchi a la même chose , ou en est tu de ton projet ?
j’ai deja travaillé sur une intégration d’un moteur avec système de réducteur pour vélo avec en projet pas mal de pièces usinée vue que je dispose de machine CNC / anodisation etc…, il est pilotable par un contrôleur basic mais j’aimerais mettre un VESC que je ne connais pas du tout, ce serait peut être sympa de pouvoir échanger sur le sujet vue que tu a l’air d’avoir pas mal réfléchi la dessus.