Mon second build, le premier était foireux et est mort rapidement, un truc c’est dessoudé dans la batterie a cause des vibrations ![]() . J’ai jamais fait de skate et je suis nouveau dans le domaine de l’esk8.
. J’ai jamais fait de skate et je suis nouveau dans le domaine de l’esk8.
Et surtout, j’ai absolument aucune idée de ce que je fais ![]()
Board
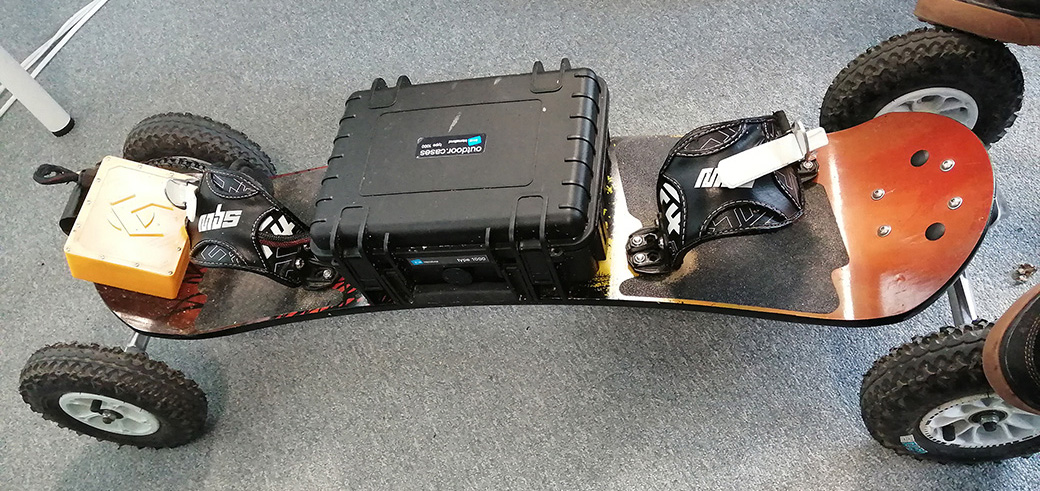
J’ai trouvé une MBS Comp 90 sur le bon coin a 75€, le gars l’utilisait dans un champ pour s’entrainer au kite surf.
- MBS vector Trucks
- Pneus MBS T3 8"
- Hubs MBS twiststar, j’en ai swap deux pour des MBS Rockstar II pour les points d’attaches de la transmission.
Battery
Un pote a « trouvé » une batterie 10S4P pour vélo constituée de LG 18650 MH1, donc une capacité de 12800 mAh. Pas vraiment demandé d’où elle vient, elle était déjà bien balancée de base.
J’ai ajouté un BMS pour 10S, 60A décharge et port commun et j’utilise un chargeur 5A, 20 cycles de charge/décharge pour le moment, pas mal de sorties et rien à signaler.

ESC
Sur mon premier build j’ai utilisé un ESC en chinoisium avec récepteur et switch integré. Ce coups ci je voulais tester les VESC, vu que je suis radin j’ai chopé un FSESC Flipsky 4.12. Programmable avec la version 1.1 du VESC tool, je sais plus trop où j’ai téléchargé le programme.

Moteur & Transmission
Pour le moteur, j’ai commandé un 6374 170kV sans marque avec hall sensor. Mais un truc a du déconner avec les capteurs, je pensais que c’était la prise, finalement c’est sans doute les capteurs en eux même dans le moteurs. Bref je tourne en unsensored, je pense upgrade tout ca plus tard de toute et tej ce moteur.
La motor mount et la transmissions viennent d’Overion, le gars vends des trucs de qualité et a été super cool par mail. Le rapport de transmission est de 10/42.

Récepteur & télécommande
Ok, donc ca c’est la partie vraiment DIY et bancale.
La télécommande et le récepteur tournent sur des arduino nano avec module RF integré.
J’ai regardé pas mal de githubs de télécommandes DIY et, bien que les codes soient bien foutus, j’ai trouvé qu’il y avait beaucoup trop de features que j’utiliserais pas. Et puis j’aime bien faire des trucs avec des arduinos. Donc, comme pas mal de programmeurs que je connais, j’ai fait ma propre meilleure version qui est sans doute bien plus pourrie a beaucoup d’égards ![]() .
.
Le récepteur se connecte à la télécommande via la puce RF (NRF24), chope une valeur entre 0 & 255 broadcasté en permanence par la télécommande et génère un signal PWM en conséquence à l’ESC. C’est la façon la plus simple de diriger l’ESC, la télécommande se reconnecte en quelques millisecondes si jamais elle reboot ou on l’éteint/rallume.
Pour la télécommande, je me suis basé sur [celle de SolidGeek] (Simple Electric longboard remote - Arduino controlled by SolidGeek - Thingiverse) et j’ai litérallement tout refait sur solidworks sauf le mécanisme de la molette. A la base je voulais mettre un écran pour afficher des trucs mais meme en faisant une coque plus grosse que celle de SolidGeek j’avais pas la place ![]() , j’ai pas de petite lipo de dispo et j’ai mis une 18650, je pense pouvoir tenir 2 semaines de charge avec ça
, j’ai pas de petite lipo de dispo et j’ai mis une 18650, je pense pouvoir tenir 2 semaines de charge avec ça ![]() .
.

Upgrades à faire
- Je vais sans doute passer en dual motor en prenant des 130kV ou 170kV chez Overion.
- Pour les VESC, je vais tej le flipsky et commander des NeoBox. J’attends les retours des premières batchs mais les gens ont l’air super hypés.
- Nouveau récepteur, je veux communiquer via UART avec l’ESC pour lire des datas et envoyer ça à la télécommande.
- Nouvelle télécommande avec un petit écran qui dis des trucs, et un meilleur joystick, j’ai juste du mal à trouver des joysticks a un axe qui pourraient matcher, ou ils coutent 60$ pièce. Si quelqu’un a une idée
 .
. - Une loopkey pour déconnecter la batterie plus facilement. J’en ai marre d’ouvrir ma box pour le faire. Et j’ai peur que quelqu’un appelle les flics en voyant la tronche de la batterie
 .
. - Faciliter la direction, c’est un veau et j’en ai marre d’avoir la même amplitude dans les virages qu’une BM.
- Une nouvelle batterie 10S5P avec des Samsung 30Q pour avoir plus de patate, sinon je vais me retrouver avec 20A par moteur en dual

Des bisous ![]() .
.