je viens partager mon build (qui est surtout une renaissance d’un ancien sujet, histoire de pas foutre trop le bordel dans les différents sujets ^^). Ce build est né surtout du black monday sur le site enertion, donc Focbox + Nano remote pas cher.
Conneries en tout genre (gaine thermo, roulements, grip, autocollant imitation carbone...)
Mon idée était d’avoir un build relativement simple (1 moteur), stable, pépouze. Vu mon poids (un bon quintal ^^), je visais les 15-20km d’autonomie, pour une VMax de 35 a 40km/h.
Du coup, mon choix s’est porté sur un 6S 192kv, 16T (moteur)/36T (roue) => ratio 1:2.3 (soit environ 35km/h max).
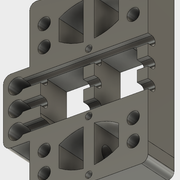
Le père noël m’ayant offert une imprimante 3D (Creality CR-10), je me suis fait plaisir sur le boitiers & les risers :
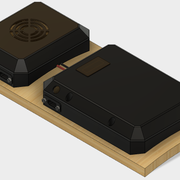
Le boitier est en 2 parties (focbox d’un coté, batteries + fusible de l’autre), fixées sur la board par des Vis M5 (socket head) dans des inserts bois.
Si quelqu’un est interressé par les stl du boitier ou autre, je mettrais sur thingiverse.
Voici quelques photos du bétail :
Dans le futur, voici les améliorations/ajouts que j’envisage :
ajouter une sorte de pare-choc imprimé en 3D pour éviter d'abimer l'avant/arrière de la board
passer sur du 17-18T au niveau de la poulie moteur pour augmenter un poil la VMax
tenter comme notre cher Cathode de passer sur un arbre moteur + long pour faire tourner les 2 roues en même temps!
J’en profite également pour ajouter que pour la charge, j’utilise un Connecteur Aviation 8Pins pour la partie Balance et un XT-90 pour la partie charge.
je fais appel à vous parce que j’ai un petit soucis : hier j’étais parti pour une petite ballade, et au bout d’1 km j’ai commencé à avoir des déconnexions étranges, lorsque j’accélère parfois ça ne fait rien du tout, parfois ça accélère à fond… J’ai enlevé le couvercle de la focbox pour jeter un oeil, il ne semble pas y avoir de dégâts particuliers. Je pensais aussi que ça pouvait être du à un manque de batterie de la télco (enertion nano-x), mais même après une full charge le comportement est le même.
Est-ce que quelqu’un à une idée de ce qui peut causer ça? Et de comment le résoudre?
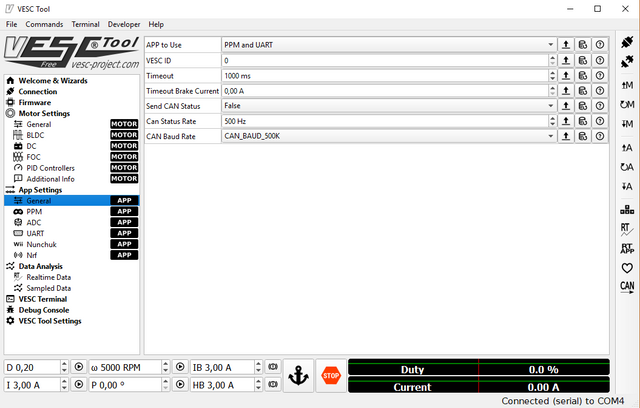
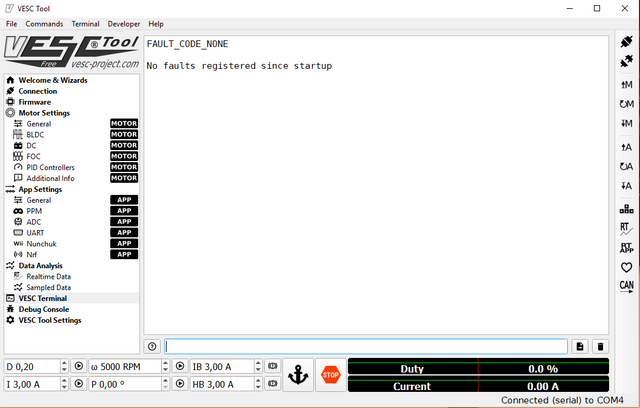
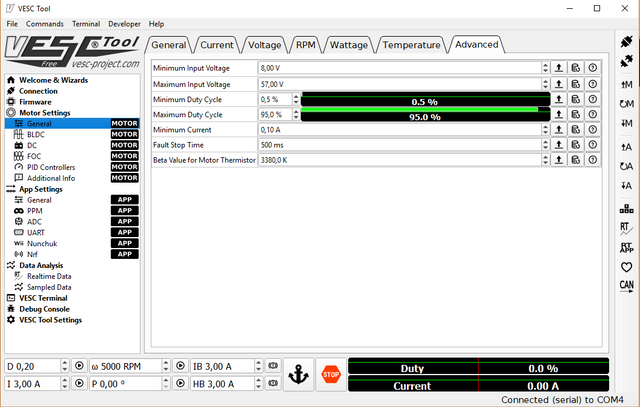
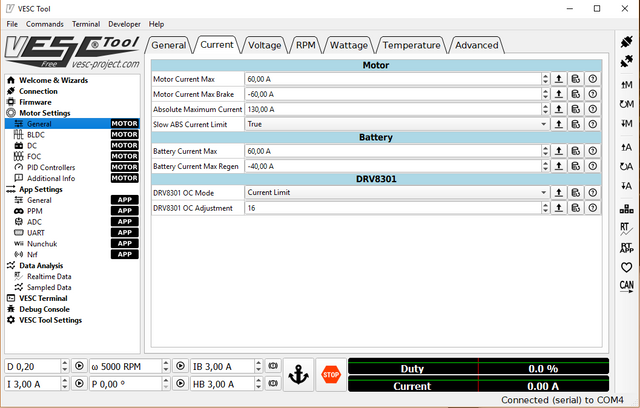
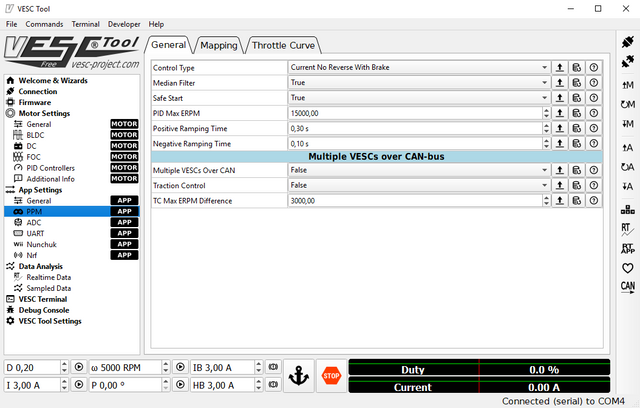
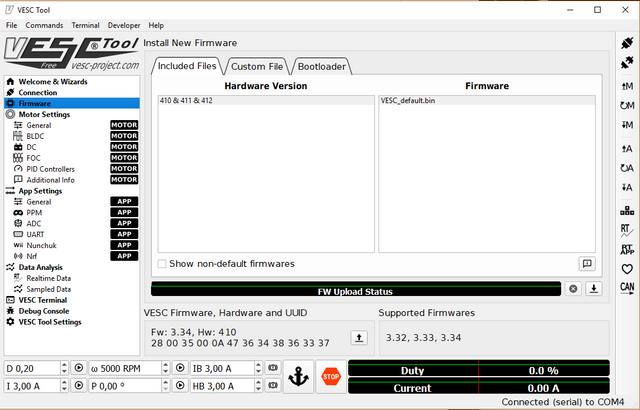
On va faire dans le classique Est-ce que l’on pourrait, stp, avoir des photos du montage, des captures d’écrans des paramètres principaux de ton BLDC/VESC Tool et le résultat de la commande “fault” et “faults” dans le terminal de BLDC/VESC Tool, etc… Bref, des infos pour nous aider à t’aider
Ton récepteur est loin de tes ESC, des fils de la batterie, des phases moteurs ? Il y a une ferrite sur le câble de ton récepteur ? T’as changé quoi en dernier sur ton build (soft et hard) ? Quand ? Et sinon, il faisait chaud hier lors de ta balade ?
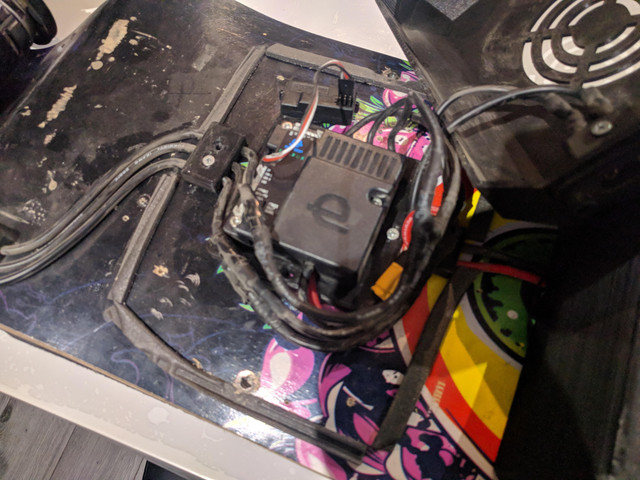
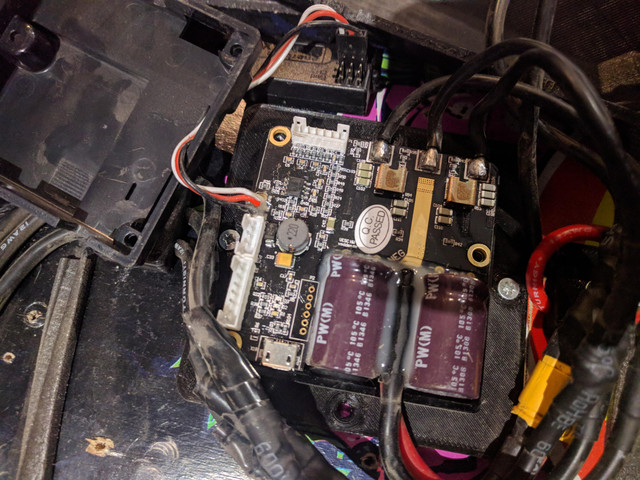
Alors pour les photos du montage & les captures d’écran je regarde ce soir.
Sinon en vrac :
pas de ferrite sur le câble du récepteur
moins de 10cm entre le récepteur et la focbox
à peu près 20-25cm entre le récepteur et les phases moteurs
à peu près 30-40cm entre le récepteur et la batterie
il y a "juste" une enclosure en PLA qui protège la partie focbox-recepteur
les câbles reliant la focbox au moteur sont en quelque sorte "enroulés" autour de la focbox, ça peut poser des soucis? (ça a toujours fonctionné jusqu'à présent)
la seconde enclosure (en PLA aussi) regroupe la partie batteries + fusible
Les derniers changements apportés sur la board sont le changement de la poulie moteur (passage de 15 à 18 dents), du coup pas touche aux câbles ni rien. Et c’était il y a 3-4 ballades donc pas de rapport.
Sinon il faisait un petit peu chaud, mais j’ai fait d’autres ballades par une plus grande chaleur donc je pense pas non plus que ça soit du à ça.
Je m’occupe ce soir de fournir les autres éléments.
2 trucs pas bon/à faire pour améliorer les choses :
pas de ferrite sur le câble du récepteur
les câbles reliant la focbox au moteur sont en quelque sorte "enroulés" autour de la focbox, ça peut poser des soucis? (ça a toujours fonctionné jusqu'à présent)
Des câbles enroulés génèrent un champ électro-magnétique, proportionnel au courant qui passe.
Or le courant moteur est de loin le plus important du système.
Pour la ferrite, il y a une vidéo comparative avec/sans faite par un membre il y a un moment.
La différence était frappante !


 Est-ce que l’on pourrait, stp, avoir des photos du montage, des captures d’écrans des paramètres principaux de ton BLDC/VESC Tool et le résultat de la commande “fault” et “faults” dans le terminal de BLDC/VESC Tool, etc… Bref, des infos pour nous aider à t’aider
Est-ce que l’on pourrait, stp, avoir des photos du montage, des captures d’écrans des paramètres principaux de ton BLDC/VESC Tool et le résultat de la commande “fault” et “faults” dans le terminal de BLDC/VESC Tool, etc… Bref, des infos pour nous aider à t’aider