Salut !
Voici un calculateur pour dimensionner vos composants:
http://ridemaker.org/calculator.php
Sous la forme de google drive:
https://drive.google.com/open?id=0B4Yvl … DdKalNsQ3M
Les fournisseurs:
http://diyelectricskateboard.com/
http://esk8.de/
http://alienpowersystem.com/
http://www.enertionboards.com/electric- … ard-parts/
http://ollinboardcompany.com/
http://hobbyking.com/
CHOIX DES COMPOSANTS
Pour choisir ces pièces, il faut établir un « Cahier des charges », ce sont les performances que l’on espère obtenir. Les critères sont:
- la masse du skate et la masse du rider.
- la vitesse maximale
- la vitesse moyenne
- l’accélération ou le temps mis pour attendre la vitesse max à l’arrêt
- la pente maximale
- la portion de la route en pente
Mais il faut savoir que les perfomances, comme l’autonomie, sont aussi influencés par:
- la température extérieure
- le choix DUAL et SINGLE moteur
- le type de roues (longboard ou MTB)
- le style de ride: pour le commuting, la course, ou la randonnée. Mais j’expliquerais ça plus tard.
A partir de ces critères, on va déterminer:
- le moteur
- les batteries
- l’ESC
- le fusible…?
On va déterminer ce que doit fournir chacun de ses élements lors de trois phases de ride:
→ phase de démarrage = celle qui demande le plus de puissance, mais très courte
→ phase nominale = phase normale, à plat et à vitesse constante
→ phase en pente = demande de la puissance, et peut être longue
Choix du moteur:
- Le choix du moteur est déterminé par la puissance et le couple qu’il doit fournir.
La puissance utile du moteur étant: P = F.V
où F est la force motrice du moteur
V est la vitesse moyenne
Pour déterminer la puissance, on va donc déterminer la force motrice.
Phase nominal :
photo issue de [silverfishlongboarding.com]
Le rider + skate est soumis à des forces qui s’opposent à son mouvement, qui sont les frottements de roulements, et les frottements aérodynamiques. Pour que cela n’influence pas sa vitesse, il faut que la force fournie par le moteur, notée Fm, soit égale à la somme de toutes ses forces. Analysons un peu ces forces:
force de frottements de roulement
Tout le monde a déjà dû remarquer que deux objets qui glissaient l’un contre l’autre frottaient. Ce sont ces mêmes frottements qui apparaissent entre les roues de nos skates et la route. Ces frottements sont proportionnelles au poids.
Ils s’expriment comme f_frott = f*mg
où f est le coefficient de frottement de roulement. Pour l’uréthane sur l’asphalte f= 0.015
m est la masse totale du rider et de son skate
g est l’accélération de pesanteur, g = 9.81 m/s²
force de frottements aérodynamiques
Cette force se fait ressentir à haute vitesse; normal, elle est proportionnelle au carré de la vitesse.
Elle s’exprime comme:
f_air = 1/2.ρ.S.Cx.V²
où ρ est la masse volumique de l’air ρ = 1,204 kg/m^3
S est la surface frontale du rider
Cx est le coefficient de trainée
V est la vitesse moyenne du rider
Sx = S.Cx est ce qu’on appelle la surface de trainée. Plus cette valeur est faible, et plus on est aérodynamique, cad qu’on pénètre plus facilement dans l’air. Elle dépend de la surface frontale du rider, et donc de sa position. Et oui, on comprend facilement qu’un camion est moins aérodynamique qu’une voiture de course, vu que la surface frontale est beaucoup plus élevé.
Les positions du plus au moins aérodynamiques, qui correspond au style respectivement « Racing », « Touring »," Commuting" du fichier google sheet.
Les valeurs associées à ses positions sont:
- Commuter: Sx = 0.6
- Touring: Sx = 0.45
- Racing: Sx = 0.3
Les coefficients associés sont pris ici:
http://i.imgur.com/nPomGTw.png
La force du moteur est: Fm = f_frott + f_air = f.mg + 1/2.ρ.Sx.V²
Phase de démarrage:
Force d’inertie d’entrainement
Les mêmes forces sont appliqués sur le système, à un terme correctif près: le terme dû à l’accélération, ce qu’on appelle, la force d’inertie d’entrainement,on a:
Fie = m.a,
où a est l’accéleration en m/s²
m la masse totale (rider + skate) en kg.
La force du moteur est: Fm = f_frott + f_air + Fie = f.mg + 1/2.ρ.S.Cx.V² + m.a
Pente:
Angle de la pente
(je reprends les schémas de wikipédia)
On note ∝ l’angle de la pente.
D’habitude, les pentes sont exprimées en %. Il s’agit de l’élevation obtenue sur la distance horizontale parcourue.
Par exemple, une pente de 10% correspond à une élévation de 10m sur une distance horizontale de 100m.
Pour calculer l’angle de la pente, on a:
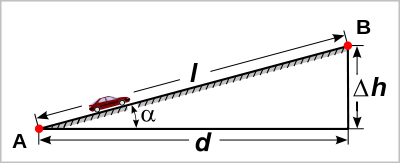
d = distance horizontale
Δh = différence de hauteurs, d’altitudes = dénivelé
tan∝ = Δh/d
Poids
Cette fois-ci le poids entre en jeu. Normal, plus on est lourd, et plus c’est difficile de monter en pente ![]()
La contribution du poids est: Fp = mg.sin∝
force de frottement de roulements
Cette force est proportionnelle à la composante normale du poids, soit mg.cos ∝
Elle s’exprime comme: f_frott = f.mg.cos ∝
La force de frottement aérodynamiques
Inchangé.
Force motrice totale: F = Fp + f_frott + f_air = mg.(sin∝ +f.cos∝) + 1/2.ρ.S.Cx.V²
La puissance maximale est soit en pente, soit au démarrage.
Il faut donc prendre un moteur qui puisse délivrer, au moins, cette puissance.
Cette puissance est celle en sortie de la poulie-roue
Il y a dissipation d’énergie, et donc de puissance par le système de transmission poulies-courroie, mais aussi par le moteur lui même. On estime le rendement à µ= 80%
La puissance que doit fournir le moteur est: P_moteur = P_méca/µ
DUAL ou SINGLE:
Avantage du Dual:
la puissance à fournir est divisé par 2 pour chaque moteur:
- gain en autonomie
- plus efficace
- plus puissant / pêchux
Mais pour un petit budget, rester en single est une bonne solution, qui offrira des performances plus que satisfaisantes en faisant les bons choix de composants.
Kv et vitesse du moteur
Le Kv est la constante de vitesse, soit le nombre de tour/min produit par le moteur pour 1V.
L’unité du kv est le tr/min/V ou RPM/V en anglais.
Pour obtenir la vitesse de fonctionnement du moteur:
N = Kv.V
avec V la tension au borne du moteur
Le Kv permet aussi d’identifier la vitesse max du moteur, en connaissant la tension max qu’il peut supporter.
Nmax = Kv.Vmax
Par exemple, un moteur de 190 kv alimenter avec une tension maximale de 44V peut atteindre une vitesse de 190*44 = 8360 tr/min.
Il est conseillé pour atteindre un régime optimal d’avoir une vitesse nominale à 80% de la vitesse maximale du moteur. Selon la vitesse moyenne que vous cherchez à obtenir, vous pouvez donc choisir votre Kv.
Kt et couple du moteur
Voici les liens dont je m’inspire:
Etude menée sur le moteur brushless (sans avoir de connaissance en électromag, ça peut être un peu compliqué à lire) :
http://krex.k-state.edu/dspace/bitstrea … sequence=1
ou un peu moins théorique, mais très bien expliqué, et en anglais:
http://www.instructables.com/id/Make-Yo … /?ALLSTEPS
Le couple est ce qui va permettre la rotation du moteur. Dans le cas du moteur brushless, ce couple est dû aux aimants, qui produisent un champ magnétique noté B, et aux bobines du stator dans lequel circule une intensité i.
D’après les liens donnés plus haut, le couple peut s’exprimer comme:
T = 2.N.B.L.D i (*)
où N est le nombre de turn (nombre de tour de la bobine sur le stator)
B est l’intensité du champ magnétique (ordre de grandeur = 1 - 1,2 T)
L la longueur du stator en m
D le diamètre du stator en m
Ce qui peut encore s’écrire: T = Kt.I
avec Kt la constante de couple en Nm/A
Plus le Kt est faible, et moins on aura besoin de courant pour fournir un couple donné.
On peut remarquer que le Kt est proportionnelle aux dimensions (longueur et diamètre) du stator.
Néanmoins, deux moteurs de dimensions différentes peuvent avoir le même Kt, mais dans ce cas, le plus petit des deux doit avoir un nombre de tour de la bobine plus elevé. Les fils ayant une résistance qui leur est propre, la résistance interne du moteur le plus petit sera plus elevé, il génerera donc plus de pertes.
Malheureusement, cette caractéristique n’est pas donné par les vendeurs la plupart du temps. Pour les moteurs de modélisme, vous pouvez contactez les fournisseurs, qui peuvent vous les donner, avec des courbes de mesures au dynamo etc, mais les vendeurs d’équipements pour skate électrique DIY n’ont pas les valeurs réels, d’après moi, à moins qu’ils les aient demandé directement à leur constructeur.
Si vous voulez calculer le Kt du moteur avec (*), vous pouvez; voici les dimensions habituelles des stators connaissant la dimension des moteurs:
50mm x 65mm → 40mm x 37mm
63mm x 55mm → 53mm x 37mm ou 53mm x 25mm
63mm x 65mm → 53mm x 47mm ou 53mm x 35mm
63mm x 75mm → 53mm x 64mm (?) ou 53mm x 45mm
Mais, on peut obtenir le Kt à partir du Kv: Kt = (60/2.pi)*(1/Kv)
Donc le Kt dans cette modélisation, serait inversement proportionnelle au Kv. Les moteurs à faible Kv, sont des moteurs dit « coupleux ».
Pour résumé:
-
Plus le moteur est gros (diamètre et longueur élevés) et plus il fournira de couple, plus faible sera sa vitesse de pointe.
-
Plus le moteur est petit (diamètre et longueur faibles), moins il fournira de couple, plus élevé sera sa vitesse de pointe.
-
Plus le kv est faible, plus il fournira de couple, plus faible sera sa vitesse de pointe.
-
Plus le kv est élevé moins il fournira de couple, plus élevé sera sa vitesse de pointe.
Il faut savoir trouver un compromis entre puissance, pour le démarrage à l’arrêt les accélérations, et surtout pour monter les côtes et la vitesse de pointe.
Choix des batteries:
Les batteries sont en générales, soit des lipo, soit des li-ion. Elles sont définies par plusieurs caractéristiques qui leurs sont propres:
Nombre de cellules (S):
Une batterie lithium est composé de plusieurs cellules ou cell" en anglais. Chaque cellule est capable de fournir un voltage fixé soit
- 3.7V pour les lipos et les li-ions,
- 3.2V pour les LiFePO4.
Pour obtenir le voltage totale de la batterie il suffit de multiplier ce que peut fournir une cellule par le nombre de cellule.
En règle général, plus on augmente le voltage, moins le courant sera elevé, plus le système sera efficace (moins de chauffe, moins de pertes).
Il est conseillé de prendre du 10S/12S et de limiter la vitesse maximale sur le contrôleur.
Constante de décharge C (S):
C’est le nombre d’ampère que la batterie peut fournir. Le nombre de C correspond au multiple de l’intensité nominale de la batterie en A. Par exemple, une batterie 5000mAh, à 20C, pourra fournir une intensité de 5*20 = 100A.
Il faut que cette intensité soit supérieure à l’intensité max dont a besoin le moteur.
Pour déterminer l’intensité, on considère la puissance utile du moteur calculé plus haut.
La puissance que doit fournir la batterie P_batt = P_u + P_pertes = U.I
avec les P_pertes = P_joule + P_perte_meca = R.I² + V.Io
avec V la tension mesurée au borne du moteur, et Io le courant qui parcourt le moteur à vide.
Je vais vous épargner le calcul, mais cela nous donne une équation du second ordre en I.
Capacité en mAh
C’est l’intensité que peut fournir une batterie pour un la batterie en 1h.
La capacité vérifie : C = I*t
Par exemple, une batterie de 5000mAh = 5Ah peut fournir 5A pendant 1h, mais peut aussi fournir 2.5A pendant 2h, ou 10A pendant 30min.
Cette caractéristique permet donc de donner l’autonomie du longboard en h:
On détermine à partir de l’intensité en pente et de l’intensité nominal, l’intensité moyenne d’utilisation:
Imoy = Ipente*p + (1-p)*Inom
avec p = le pourcentage de trajet en pente
Le temps de fonctionnement de la batterie est donc : t = C/I_moy
Pour convertir en km, d = V*t avec V la vitesse moyenne
Choix de l’ESC
Il s’agit du contrôleur. C’est celui qui fait le lien entre tous les composants. Il capte le signal envoyé par le récepteur, et va moduler la tension fournie par la batterie en fonction.
Comme pour la batterie, il faut choisir un ESC capable de supporter l’intensité maximale. Il vaut mieux surdimensionné un petit peu pour ne pas griller ce composant.
Il n’y a pas beaucoup de choix en 10/12S, et les avis convergeront vers le VESC. L’ESC open source crée par Vedder, du monde du DIY lui aussi, et spécialisé pour nos skates électriques. D’après tous les témoignages, il offre un démarrage smooth avec un moteur sensorless, donc sans capteur, là où les moteurs sensorless avaient un démarrage difficile. Il a aussi une multitude de réglage possible.
Mais ils ont tendances à être un peu cher actuellement.
Pour les configurations en 6S/8S(?), avec un petit budget, il est possible d’utiliser un ESC de voiture ou de bateau rc (pas d’avions, ou d’héli qui n’ont pas de freinage). Mais il faut avoir conscience que ces ESC ne sont pas les plus adaptés et sont limités dans les réglages.
Réduction Poulie-Courroie
Je vais reprendre un schéma que j’avais posté:
On a vu tout à l’heure comment déterminer la vitesse de rotation du moteur Na en tr/min, pour le convertir en rad/s, on utilise:
w_moteur = (2.pi/60)*Na
La vitesse angulaire du moteur est réduit :
w_roue/w_moteur = Z_moteur/ Z_roue = r (rapport de réduction) = C_mot / C_roue
où C_mot et C_roue sont les couples fournies au niveau du moteur et de la roue.
Pour déterminer la vitesse linéaire du longboard, on a: V = w_roue*R où R est le rayon de la roue
Cette vitesse est en m/s, pour la convertir en km/h, on multiplie par 3.6.
Pour choisir le rapport de réduction, il faut donc prendre en compte la vitesse qu’on veut atteindre, mais aussi le couple à fournir.
- Pour gagner en couple, on peut augmenter Z_roue et diminuer Z_moteur
- Pour gagner en vitesse de pointe, on peut augmenter Z_moteur et diminuer Z_roue
Néanmoins, Z_moteur ne peut pas dépasser une certaine valeur pour garantir une transmission optimale. En règle général, Z_moteur doit être tel qu’il y est toujours 5 dents de la courroie qui soit engrengé dans la poulie.
Pour tester le nombre de dents dans la poulie, vous pouvez utilisé ce site: http://www.bbman.com/belt-length-calculator/



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}